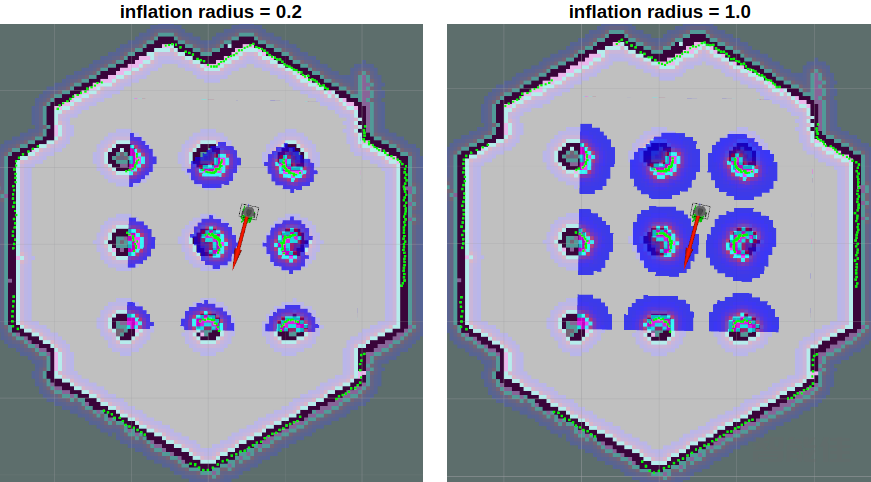
导航堆栈有许多参数可以改变不同机器人的性能。膨胀半径inflation_radius定义于turtlebot3_navigation/param/costmap_common_param_${TB3_MODEL}.yaml该参数使膨胀区域远离障碍物。路径将被规划,以便它不会穿过该区域。将其设置为大于机器人半径是安全的。 障碍物膨胀比例系数cost_scaling_factor定义于turtlebot3_navigation/param/costmap_common_...
注意:使用官方树莓派版本的用户,请在Remote PC端进行仿真操作;第一次在Remote PC端进行仿真操作时候,可能需要等待几分钟的环境初始化操作。安装仿真功能包对于Ubuntu16.04:前提:已经安装了turtlebot3包和turtlebot3_msgs包,参考:安装cd catkin_ws/srcgit clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git编...
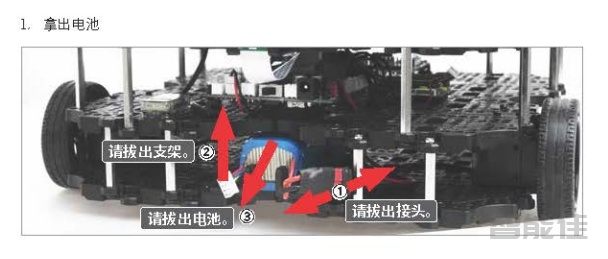
官方1800mAh电池充电方法如下:如果长时间调试,推荐可以拔掉电池,用电源适配器直接供电。大电池12000mAh充电视频如下:充电...
1.当电池电压低于11V时,蜂鸣器报警将持续响起,舵机轮子将被禁用。当蜂鸣器报警响起时,电池必须进行充电。...

注意:本网页只提供一些其他网友关于turtlebot3的探索,只提供链接,大家可以参考,具体做法还是需要大家自行探索和开发。1.有关rtabmap_ros:来源:https://get-help.robotigniteacademy.com/t/error-when-running-rtabmap-ros-with-turtlebot3/12231ROS多机协同ROS控制多台机器人实现多机协同...