
项目背景对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务?我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特别是在高精度领域:策略中的错误可能会随着时间的推移而复合,而人类的演示可能是不...
![[开源项目]Mobile ALOHA低成本全身远程操作手臂](http://www.rosrobot.cn/zb_users/upload/2024/01/202401051704450962810480.png)
从人类演示中进行的模仿学习在机器人技术中表现出了令人印象深刻的表现。然而,大多数结果都集中在桌面操作上,缺乏一般有用任务所需的移动性和灵活性。在这项工作中,我们(斯坦福华人团队)开发了一种用于模仿双手且需要全身控制的移动操纵任务的系统。我们首先推出Mobile ALOHA,这是一种用于数据收集的低成本全身远程操作系统。它通过移动底座和全身遥控操作界面增强了ALOHA系统。然后,我们使用Mobile ALOHA收集的数据执行监督行为克隆,并发现与现有静态ALOHA数据集的联合训...
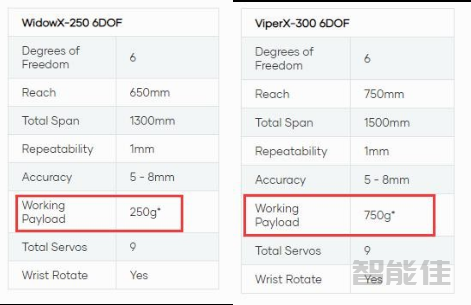
尊敬的客户:感谢您选择智能佳的WidowX-250 6DOF 和 ViperX-300 6DOF机械臂,该款产品属于科研平台,主要用于科学研究和理论验证,不建议用于实际工业生产。当您收到该套产品时,请及时进行设备硬件检查,确保产品完好无损。在使用过程中请严格按照产品使用说明书的要求进行使用、维护和保管,以避免因不当操作而导致的损害。WidowX-250 6DOF 和 ViperX-300 6DOF 机械臂是...
![[资讯]国内也可以直接采购谷歌与斯坦福联合开发的ALOHA 2双臂协作开源平台了](http://www.rosrobot.cn/zb_users/upload/2024/02/202402201708422963558886.jpg)
2024年1月,谷歌 DeepMind 联合斯坦福推出了ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的抓持性能、更符合人体工程学设计和更强的稳健性,并且在国内就可以直接采购,整套成本还不到20万元人民币。可订购的套装件(建议工作桌自己配置,其他设备都可以采购)多样化的演示数据集推动了机器人学习的重大进步,但此类数据的灵活性和规模可能受到硬件成本、硬件鲁棒性和远程操作难易程度的限制。推出ALOH...
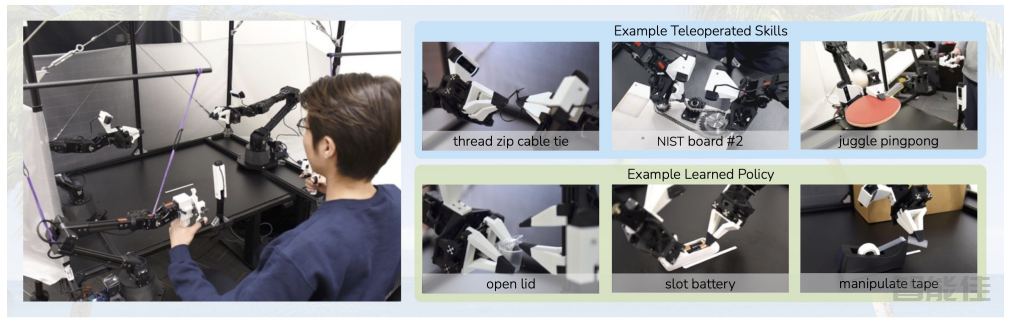
对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务?我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特别是在高精度领域:策略中的错误可能会随着时间的推移而复合,而人类的演示可能是不稳定的。...
镜像下载Ubuntu 20.04.6 LTS (Focal Fossa)Ubuntu 22.04.4 LTS (Jammy Jellyfish)ROS安装wget http://fishros.com/install -O fishros && . fishros...
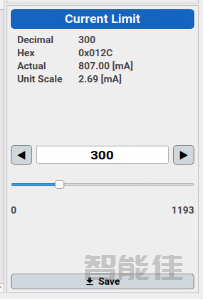
设置的是大臂VX300机器人夹具打开Dynamixel Wizard,然后选择从机臂的手腕电机。它的名字应该是[ID:009] XM430-W350提示:机器人与Dynamixel Wizard对话时,底座上的LED灯会闪烁。这将有助于确定选择哪个机器人。找到38 Current Limit(位置寄存器38),输入300,然后点击底部save。对两个大臂VX300机器人的9号舵机重复此操作。这限制了通过夹具电机的最大电流,以防止过载错误。...
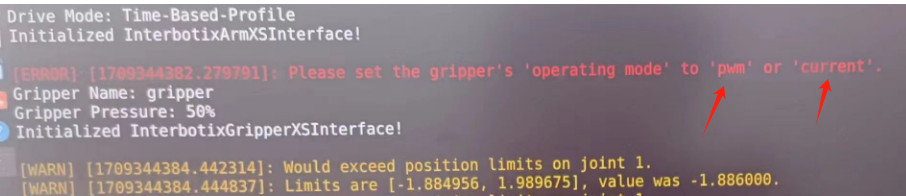
下载原始aloha 包可能会有报错提醒:可以通过以下方案进行解决:找到aloha文件夹下的config文件夹下的4个配置文件,文件名称分别为master_modes_left.yaml、master_modes_right.yaml、puppet_modes_left.yaml、puppet_modes_right.yaml按照下图进行修改:port: /dev/ttyDXL_master_left
groups:
arm...

转到arm.py文件vim ~/interbotix_ws/src/interbotix_ros_toolboxes/interbotix_xs_toolbox/interbotix_xs_modules/src/interbotix_xs_modules/arm.py +76查找函数publish_positions。更改self.T_sb = mr.FKinSpace(self.robot_des.M, self.robot_des.Slist, self.jo...
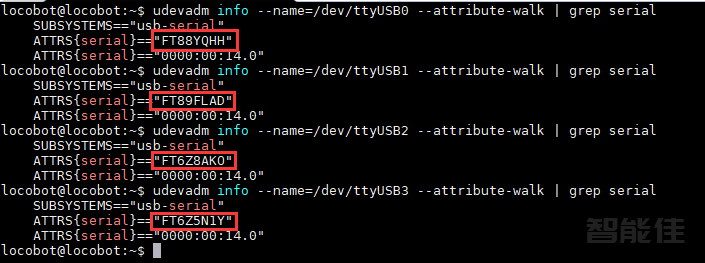
每个机器人绑定的端口可能会随着时间的推移而改变,例如最初的机器人ttyUSB0可能会突然变成ttyUSB5。为了解决这个问题,我们使用以下映射将每个机器人绑定到固定的符号链接端口:ttyDXL_master_right:右主机机器人(主机:操作者手持的机器人)ttyDXL_puppet_right:右从机机器人(从机:执行任务的机器人)ttyDXL_master_left: 左主机机器人ttyDXL_puppet_left: 左从机机器人以ttyDXL_m...
1.D405产品概要 Realsense D400系列的传感器D405,这个产品的定位就是近景深度相机。2.概要参数深度相机相关参数深度理想量程范围:7cm-50cm曝光方式:全局快门深度测量方式:双目立体深度视场:87°(水平)×58°(竖直)最小深度距离:7cm @ 480p深度输出分辨率:至多1280×720深度测量精度:±2% at 50cmRGB相机相关参数成像方式:左相机传感器影像视场:87°...
sudo apt install curlcurl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.shchmod +x xsarm_amd64_install.sh ./xsarm_...
下载功能包cd ~/interbotix_ws/srcgit clone http://mirror.ghproxy.com/https://github.com/tonyzhaozh/aloha.gitcd ~/interbotix_wscatkin_make...
下载ACT功能包cd ~/interbotix_ws/srcgit clone http://mirror.ghproxy.com/https://github.com/tonyzhaozh/act.gitcd ~/interbotix_wscatkin_make...