
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2476 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
1849 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

上一代 LDS 传感器(LDS-02)已停产,自 2025 年起由 LDS-03 取代。LDS-03相比LDS-02:性能更强:更远的探测距离、更高的测量精度、更快的扫描速度。可靠性更高:极长的使用寿命和更强的环境光抗干扰能力,适合长期、复杂的应用场景。体积更小、更轻便:有助于机器人的小型化和轻量化设计。概述360激光测距传感器LDS-03是一款2D激光扫描仪,能够感知360度,收集机器人周围的一组数据,用于SLAM(同时定位和建图)和导航。üLDS-03 用于 Turtle...

激光雷达LDS-02配置说明TurtleBot3 LDS 自 2022 年起已更新为 LDS-02 型号。请按照以下在 TurtleBot3 的 SBC (Raspberry Pi) 上的说明进行操作。1.安装 LDS-02 驱动并更新 TurtleBot3 包。sudo apt updatesudo apt install libudev-devcd ~/catkin_ws/srcgit clone -b develop https://github.com/ROBOTIS...

说明:介绍Turtlebot3的激光雷达LDS图示: 概述HLS-LFCD LDS用于TurtleBot3的两种型号。LDS(激光距离传感器)是将由障碍物检测收集的数据发送到用于SLAM技术的主机的传感器基本性能规格项目规格工作电源电压5V DC±5%光源半导体激光二极管(λ= 785nm)激光安全IEC60825-1 Class 1电流消耗400mA以下(冲击电流1A)检测距离120mm〜3,500mm接口3.3V USART(230,400 bps)每6度42b...
驱动安装注册公钥sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE添加库地址sudo add-apt-repos...
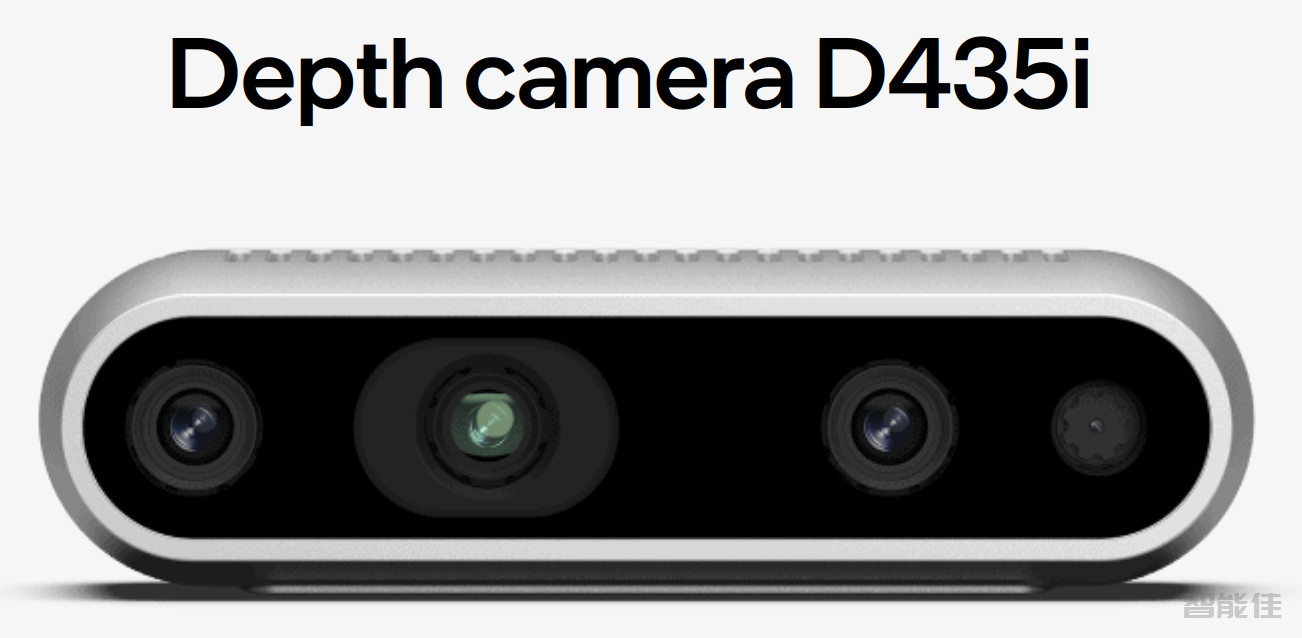
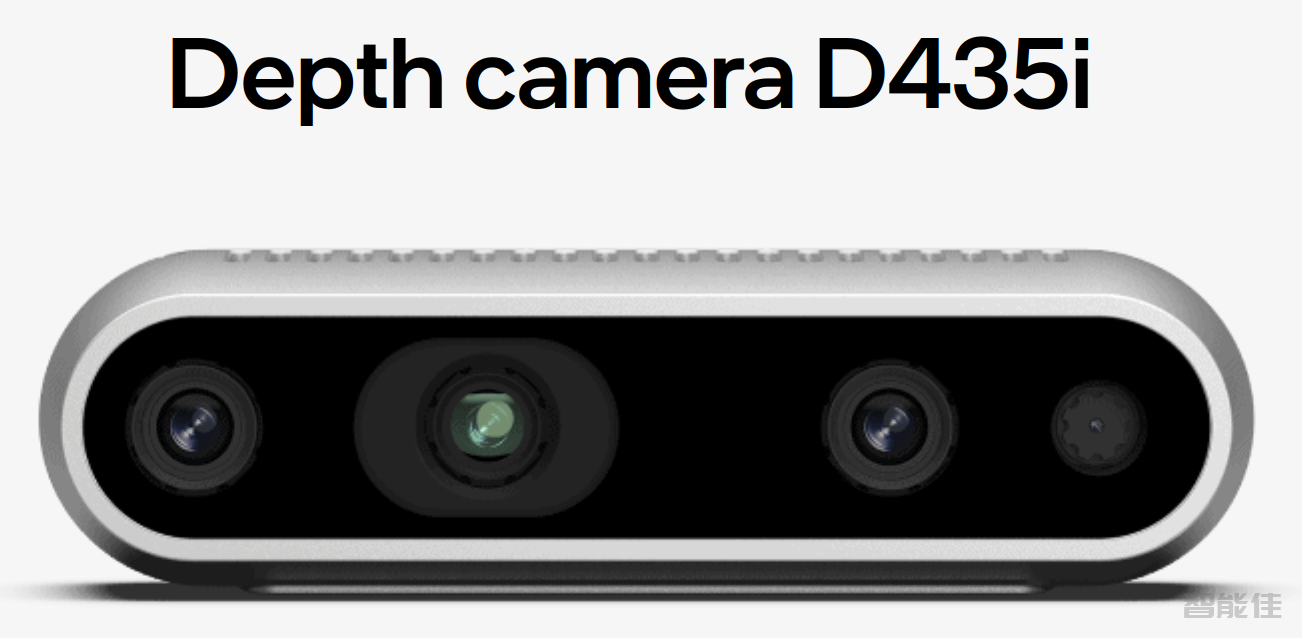
sudo apt-get install ros-$ROS_DISTRO-rgbd-launch sudo apt-get install ros-$ROS_DISTRO-realsense2-camera -y测试ROS功能roslaunch realsense2_camera rs_camera.launch 打开可视化UI界面rqt_image_view...

目前比较常见的测距单元包括激光测距、超声波测距、图像测距。其中,激光测距是最为常用的方式。通常激光测距单元比较精确、高效并且其输出不需要太多的处理。其缺点在于价格一般比较昂贵,但好在目前已经有一些价格比较便宜的激光测距单元。激光测距单元的另外一个问题是其穿过玻璃平面的问题。另外激光测距单元不能够应用于水下测量。另外一个常用的测距方式是超声波测距。超生波测距以及声波测距等以及在过去得到十分广泛的应用。相对于激光测距单元,其价格比较便宜但其测量精度较低。激光测距单元的发射角最小仅...
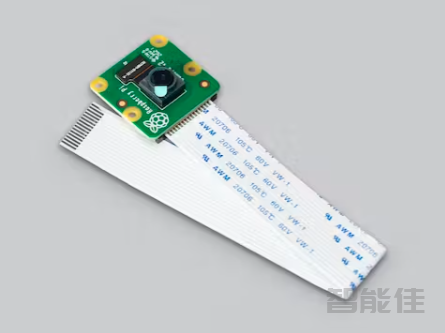
树莓派相机V2.1摄像头模块搭载索尼IMX219 800万像素传感器(相比原款摄像头的500万像素 OmniVision OV5647传感器)。相机模块V2.1可用于拍摄高清视频以及静态照片。它对于初学者来说很容易使用,但如果你想扩展你的知识,它有很多东西可以为高级用户提供。网上有很多例子表明人们将其用于延时摄影、慢动作和其他视频智能。您还可以使用我们与摄像机捆绑在一起的库来创建效果。您可以在索尼网站上阅读有关IMX219和 Exmor R背照式传感器架构的所有血腥细节,但足...
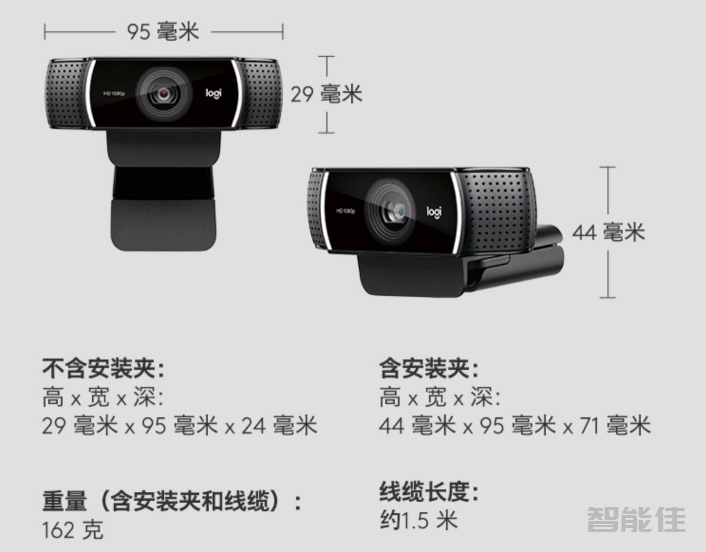
尺寸尺寸包括固定安装夹高度: 44 毫米宽度: 95 毫米深度: 71 毫米电缆长度: 1.5 米重量: 162 克技术规格最大分辨率: 1080p/30帧/秒 - 720p/ 60帧/秒相机像素: 300万对焦类型:自动对焦镜头类型:玻璃内置麦克风:立体声麦克风范围: 最长 1 m对角线视场 (dFoV): 78°数码变焦: 1.2 倍 系统要求兼容Windows8或更高版本MacOS 10.10或更高版本ChromeOSUSB-A端口...
S1雷达ROS包更新指南更新ROS包cd ~/catkin_ws/srcsudo rm -r rplidar_rosgit clone https://gitee.com/kay2020/rplidar_ros.git cd .. catkin_make测试roslaunch rplidar_ros view_rplidar_s1.launch...