
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2753 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2105 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

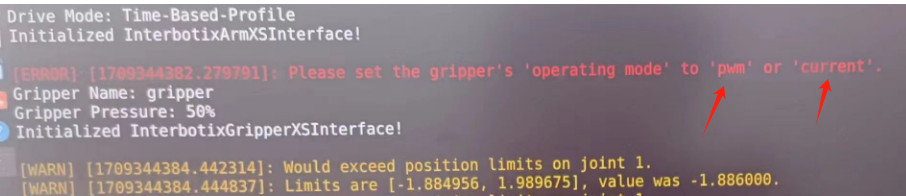
电机上的红色LED闪烁如果电机的LED大约每秒闪烁一次,则表明其处于错误状态。在此状态下,电机将关闭扭矩并且不响应命令。发生这种情况的两个常见原因是“过载”或“过热”。如果电机被命令转到某个位置,但实际上由于有障碍物而无法实现,则可能会发生过载。如果使用两指夹具进行位置控制,通常会出现这种情况。如果夹具被命令完全靠近一个小的刚性物体,电机将停转,并在几秒钟后进入错误状态。因此,如果使用夹具进行位置控制,请确保将夹具关闭到足以抓住物体的程度,但不要过多。或者,使用PWM或电流控...

TL;DR:如果您的ACT政策不稳定或在剧集中间暂停,请训练更长时间!成功率和平滑度可以在损失达到稳定水平后得到改善。ACT调整提示-在将ACT应用于新环境时,块大小chunk_size是最重要的参数。一个区块应对应约1秒钟机器人运动。-高KL重量(10或100),或不带CVAE编码器的列车。-考虑删除temporal_agg,并在此处增加查询频率,使其与块大小相同。即,每个块都被完全执行。-训练很长时间(在事情趋于平稳之后,见图)-尽量增加batch_size大小,并相应地...
Ubuntu镜像下载Ubuntu 20.04.6 LTS (Focal Fossa)ROS安装wget http://fishros.com/install -O fishros && . fishros...
下载原始aloha 包可能会有报错提醒:可以通过以下方案进行解决:找到aloha文件夹下的config文件夹下的4个配置文件,文件名称分别为master_modes_left.yaml、master_modes_right.yaml、puppet_modes_left.yaml、puppet_modes_right.yaml按照下图进行修改:port: /dev/ttyDXL_master_left
groups:
arm...

转到arm.py文件vim ~/interbotix_ws/src/interbotix_ros_toolboxes/interbotix_xs_toolbox/interbotix_xs_modules/src/interbotix_xs_modules/arm.py +76查找函数publish_positions。更改self.T_sb = mr.FKinSpace(self.robot_des.M, self.robot_des.Slist, self.jo...

sudo apt install curlcurl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.shchmod +x xsarm_amd64_install.sh ./xsarm_...

下载功能包cd ~/interbotix_ws/srcgit clone http://mirror.ghproxy.com/https://github.com/tonyzhaozh/aloha.gitcd ~/interbotix_wscatkin_make...

下载ACT功能包cd ~/interbotix_ws/srcgit clone http://mirror.ghproxy.com/https://github.com/tonyzhaozh/act.gitcd ~/interbotix_wscatkin_make...

pip install安装系列pip install h5py -i https://pypi.tuna.tsinghua.edu.cn/simplepip install torch -i https://pypi.tuna.tsinghua.edu.cn/simplepip install Ipython -i https://pypi.tuna.tsinghua.edu.cn/simplepip install dm_control&nbs...
ViperX-300 6自由度机械臂属于Interbotix X系列机械臂系列,具有来自 Robotis的 DYNAMIXEL X系列执行器。X系列执行器提供更高的扭矩、更多高效散热和更好的耐用性,外形尺寸比以前更小DYNAMIXEL伺服器。DYNAMIXEL XM540-W270 &DYNAMIXEL XM430-W350伺服提供高4096个位置的分辨率和用户可定义的PID参数,温度监控,位置反馈以及电压电平、负载和合规性设置也可由用户访问。在ViperX...