ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2750 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2099 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
从人类演示中进行的模仿学习在机器人技术中表现出了令人印象深刻的表现。然而,大多数结果都集中在桌面操作上,缺乏一般有用任务所需的移动性和灵活性。在这项工作中,我们(斯坦福华人团队)开发了一种用于模仿双手且需要全身控制的移动操纵任务的系统。我们首先推出Mobile ALOHA,这是一种用于数据收集的低成本全身远程操作系统。它通过移动底座和全身遥控操作界面增强了ALOHA系统。然后,我们使用Mobile ALOHA收集的数据执行监督行为克隆,并发现与现有静态ALOHA数据集的联合训...
概述本教程将指导您如何操作斯坦福Mobile ALOHA机器人,包括机器人的使用、配置与控制,帮助您快速熟悉其功能并应用于实际场景。准备工作检查设备确保机器人硬件完整无损,电池充满电。准备好与机器人通信的控制终端(如笔记本电脑或台式机)。开机操作如图按下下面几个电源按钮:123 1.长按下移动电源总开关2.按下AC交流电开关3.按下HUB电源 观察状态指示灯,确保移动电源正常启动。按下笔记本电脑电源,开启笔记本电脑 &nb...
镜像下载Ubuntu 20.04.6 LTS (Focal Fossa) (目前支持)安装必要的软件确保您的控制终端已安装ROS(版本:Noetic)。rosversion -d 安装Mobile ALOHA的依赖包:sudo apt updateROS安装,选择noetic版本(斯坦福开源版本)wget http://fishros.com/install -O fishros && . fishros参考资料https://mobile...
interbotix机械臂功能包安装sudo apt install curlcurl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.shchmod +x xsarm_amd64_i...
USB连接整个机器人需要9个USB口,使用两个USB集线器进行此设置要将Tracer Base连接到笔记本电脑,请使用底座附带的USB-CAN总线转换器。机械手臂有4个USB1个连接移动底盘的USB1条里程计USB1个前置摄像头2个机械臂腕部相机将这两个USB集线器分别插入笔记本USB端增加相机机械臂USB配置文件查看USB串口号udevadm info --name=/dev/ttyUSB0 --attribute-walk | grep serial同理udevadm i...
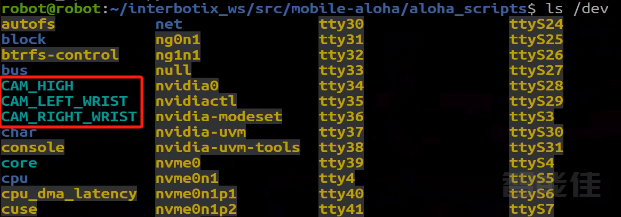
您可以在此处使用USB集线器,但每个集线器最多可使用2个摄像头,以实现合理的延迟。为了确保所有3个摄像头都绑定到一致的端口,需要类似的步骤。相机默认绑定到/dev/video{0, 1, 2...},而我们希望有符号链接{CAM_RIGHT_WRIST, CAM_LEFT_WRIST, CAM_HIGH}举CAM_RIGHT_WRIST个例子,假设它现在绑定到/dev/video0.运行udevadm info --name=/dev/video0 --attribute-w...
通过自带的CAN转USB线将底座连接至电脑,然后开机。从 AgileX 安装 SDKpip3 install pyagxrobots启用gs_usb内核模块sudo modprobe gs_usb调出 CAN 设备sudo ip link set can0 up type can bitrate 500000如果前面的步骤没有发生错误,您现在应该可以使用命令看到 can 设备ifconfig -a安装并使用can-utils测试硬件sudo apt install can-u...
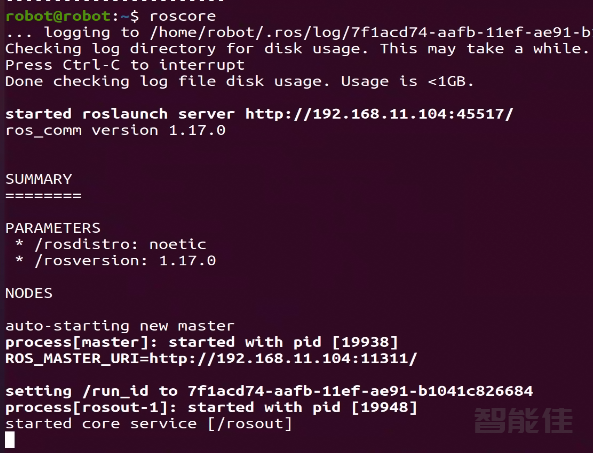
启动roscore打开终端,开启roscoreroscore 启动4个手臂roslaunch aloha 4arms_teleop.launch 再次开启一个终端,输入rqtrqt 选择Plugins--->Visualization ---->Image View再次选择,重复2次然后勾选相应相机话题 最终如图:...
前提:安装CAN,检查CAN总线是否连接正常,HUB是否开启参考旋开底盘旋钮,并软件输入以下内容,使能CAN总线cd /home/robot/interbotix_ws/src/mobile-aloha/aloha_scripts./enable_can.sh 启动底盘(底盘版本里程计)roslaunch tracer_bringup tracer_robot_base.launch查看话题,看是里程计否启动成功:rostopic listrostopic echo...
注意:在运行以下命令之前,请务必将所有4个机器人置于睡眠(sleep)位置,并打开主机器人的抓手。所有机器人都会上升到易于远程操作的高度。# Right hand terminal右手臂终端conda activate alohacd ~/interbotix_ws/src/mobile-aloha/aloha_scriptspython3 one_side_teleop.py right# Left hand terminal左手臂终端conda activate aloh...





![[开源项目]Mobile ALOHA低成本全身远程操作手臂](http://www.rosrobot.cn/zb_users/upload/2024/01/202401051704450962810480.png)