TurtleBot3使用课程-第一节a(北京智能佳)
注意:当前课程中示例来源主要针对与ROS kinetic 版本和最初树莓派3B版本的机器人,后面的机器人软件已经升级了好几版本,部分内容可能于此说明不一致,仅供参考。
1.ROS设置(远程PC)
1.1 ROS安装和设置
参考资料:http://wiki.ros.org/kinetic/Installation/Ubuntu
ROS Kinetic版本适用于Ubuntu15.10,Ubuntu16.04和Debian8,但建议使用Ubuntu16.04。
1.1.1 设置source.list
输入下面的命令以获得要安装的ROS包的最新版本。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
1.1.2 键设置
设置访问Ubuntu服务器的key。
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
1.1.3 ROS安装
首先,更新到最新版本的Ubuntu包索引。
sudo apt-get update
您可以逐个安装所需的ROS包,但一般情况下,建议安装桌面-完整包,如下所示
sudo apt-get install ros-kinetic-desktop-full
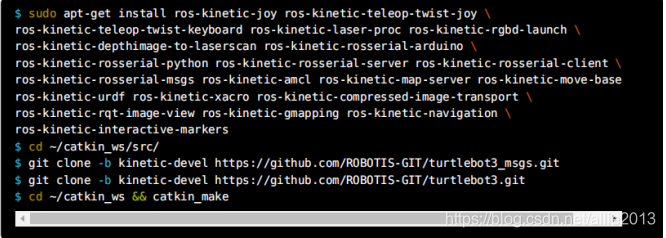
此外,安装下面的包有助于创建和管理ROS工作区或下载与ROS包相关的其他包。
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy \
ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc \
ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan \
ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python \
ros-kinetic-rosserial-server ros-kinetic-rosserial-client \
ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server \
ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro \
ros-kinetic-compressed-image-transport ros-kinetic-rqt* \
ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers
1.1.5初始化rosdep
在使用ROS之前需要初始化rosdep。
rosdep帮助您安装编译或运行用ROS编写的代码所需的相关包(正式称为依赖)
sudo rosdep init
rosdep update
如下图所示,将带有ROS设置的环境文件添加到.bashrc文件中,这样它每次运行shell时都会自动运行。
echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
下面是将.bashrc文件重新加载到当前打开的shell的命令。
source ~/.bashrc
1.2 基于ROS命令

命令 | 功能 |
roscore | 用作单个命令。 运行ROS主机和运行ROS所需的服务器。 |
rosrun | 运行指定的节点。 |
roslaunch | 使用选项运行文件中指定的多个节点。 |
rosclean | 检查或删除ROS的日志文件。 |
roscd | 将(更改dir)移动到存储指定ROS包的目录。 |
rostopic | 检查ROS主题信息。 |
rosservice | 检查ROS服务信息。 |
rosnode | 检查ROS节点信息。 |
rosparam | 检查ROS参数信息。 |
rosbag | 记录或播放ROS中的消息。 |
rosmsg | 显示ROS消息数据结构。 |
rossrv | 显示ROS服务数据结构。 |
catkin_create_pkg | 自动生成ROS包和相关文件。 |
catkin_make | 用catkin构建系统构建包。 |
rospack | 显示指定的ROS包信息。 |
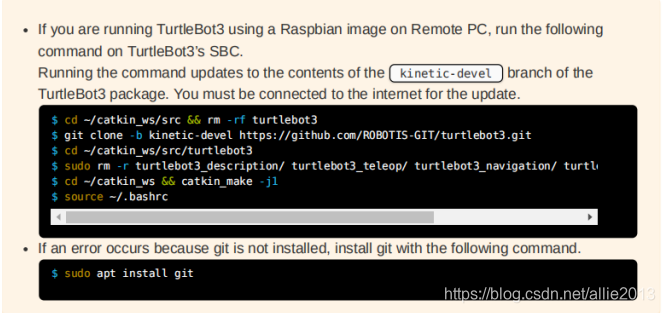
2.TurtleBot3 ROS安装
用RaspberryPI3B+和RaspbianOS安装ROS1动力学。
图像文件包含ROS和TurtleBot3的基本包。
当使用不同的SBC和OS时,请参阅每个软件和硬件的手册。
1.下载Turtlebot3Raspbian图像为RaspberryPI3B+
2.下载后提取压缩文件
3.使用蚀刻器或Win32 DIsk Imager(Linux,Windows)工具将映像文件复制到SD卡
4.根据官方指南
5.从这里开始,使用连接到RaspberryPI的监视器和输入设备从RaspberryPI终端运行
6.输入下面的配置命令并选择 ![]() >
>
7.网络时间协议(NTP)服务器安装和同步

8.当设置完成后,您可以删除连接到RaspberryPI的监视器和输入设备。
3.网络设置
3.1PC网络设置
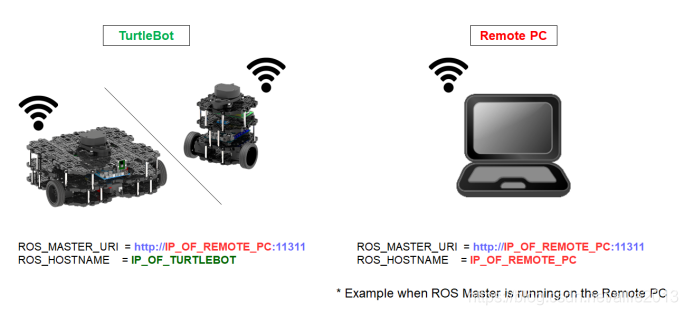
ROS Master运行在Turtlebot3的远程PC上。
必须为基于ROS的Turtlebot3和远程PC设置IP地址以相互通信。
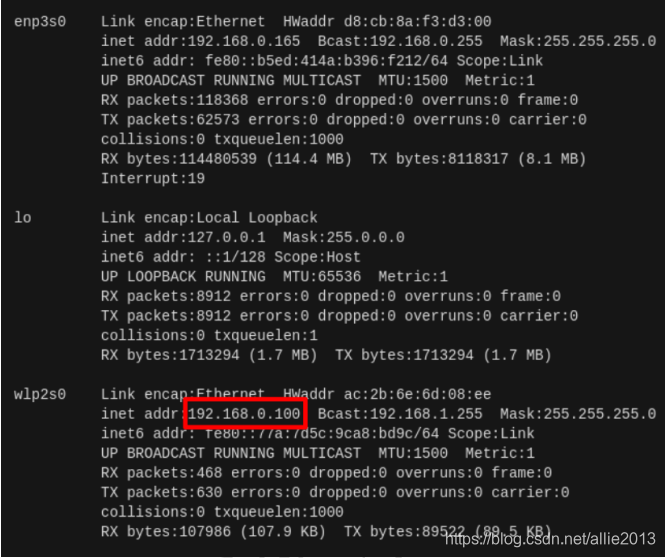
请注意,远程PC和TurtleBot3的PC(或SBC)必须连接到同一路由器才能连接到同一无线网络。 连接到网络后,通过输入以下命令查找IP地址。

下面显示的IP地址是远程PC的IP地址。
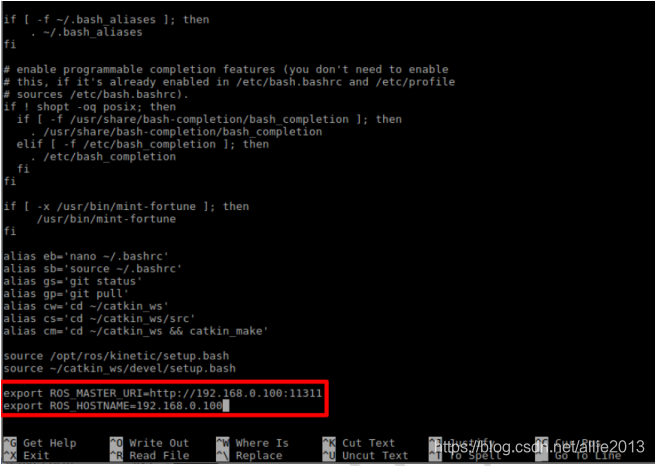
修改网络配置文件中的设置。如果未安装nano编辑器,请安装编辑器首先使用以下命令。

新闻 ![]() 移动到文件的末尾。输入远程PC的IP地址的
移动到文件的末尾。输入远程PC的IP地址的 ![]() 还有
还有 ![]() 如下所示
如下所示
当你完成编辑的时候 ![]() ,按
,按 ![]() 在屏幕上问你是否愿意保存,然后按
在屏幕上问你是否愿意保存,然后按 ![]() 覆盖文件并退出。
覆盖文件并退出。
最后,使用下面的命令将bashrc文件中的更改应用到当前终端窗口。

3.2. Turtlebot3 SBC网络设置
若要从远程PC访问TurtleBot3 SBC终端,请输入ssh命令和TurtleBot3SBC的IP地址如下所示。 默认密码为小写

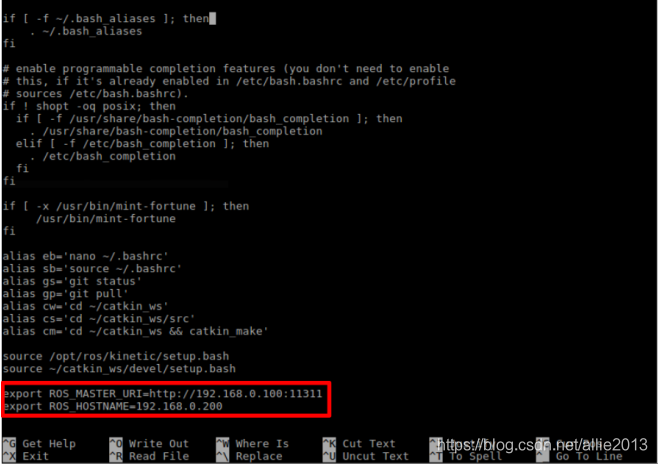
在终端窗口输入一下命令,编辑RaspberryPI的配置文件。

新闻 ![]() 移动到文件的末尾。如下图,输入的IP地址远程PC到
移动到文件的末尾。如下图,输入的IP地址远程PC到 ![]() 并将RaspberryPI的IP地址发送到
并将RaspberryPI的IP地址发送到![]()
4.运行Turtlebot3
在运行TurtleBot3之前,安装TurtleBot3所需的ROS包。
4.1 提供
执行下面的命令时,请区分RemotePC和TurtleBot3 SBC。 特别是,不要在TurtleBot3 SBC上运行roscore。在执行命令之前,确保每个设备(TurtleBot3 SBC,RemotePC)的IP地址设置正确。
如果电池的电压低于11V,机器人将连续蜂鸣。 停止使用机器人,如果低压蜂鸣声响起,则给电池充电。
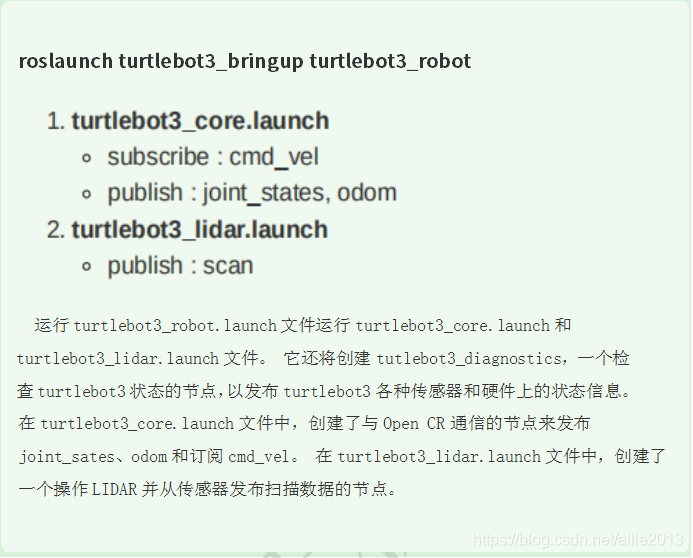
4.1.1 运行
[远程PC]运行![]() 下面的命令
下面的命令
4.1.2 TurtleBot3 提供
[TurtleBot3 SBC]以下安装方法仅适用于ROS1动力学。
如果TurtleBot3 模型是Burger,则当提包成功执行时,将在终端中显示一下消息
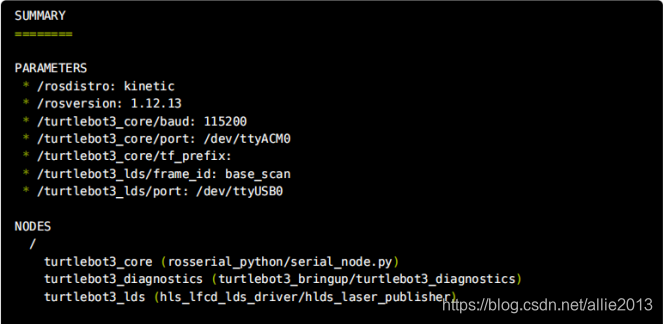
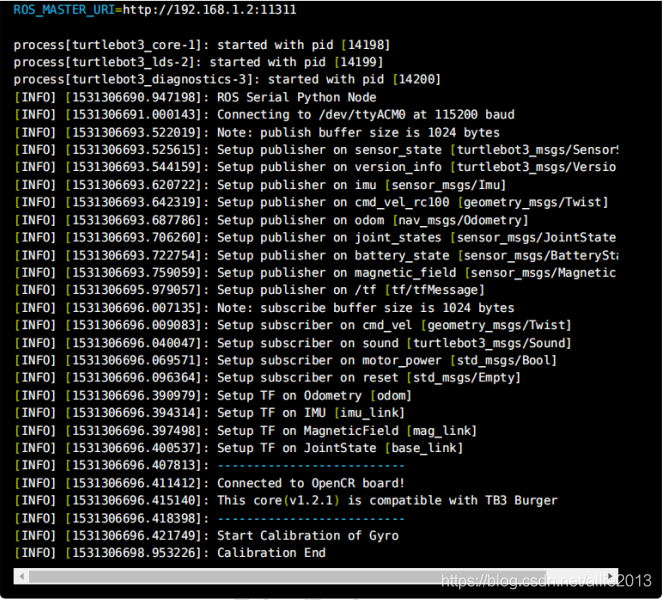
如果消息中发生与LIDAR(扫描)相关的传感器错误,请在检查TurtleBot3的LDS-01传感器连接后重复启动过程或重置OpenCR。
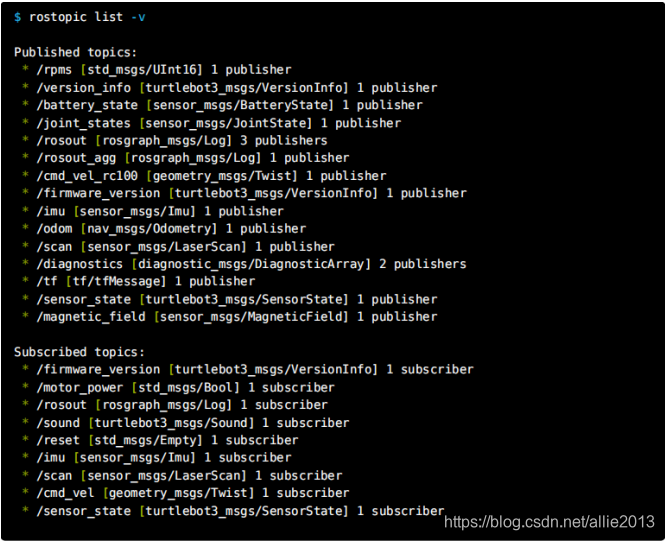
[远程PC]下面的命令显示了Turtle Bot3和远程PC成功执行时使用的主题列表。
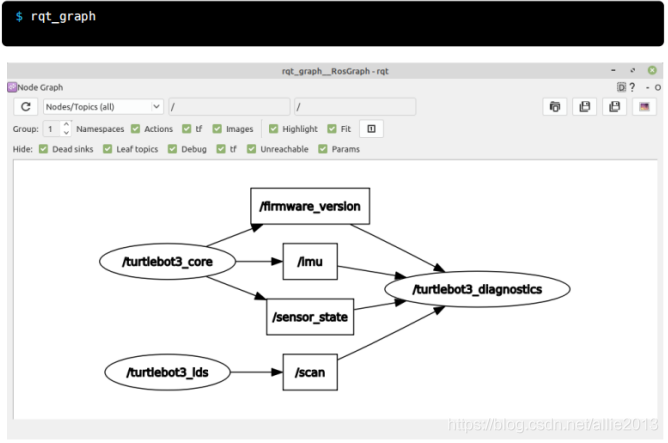
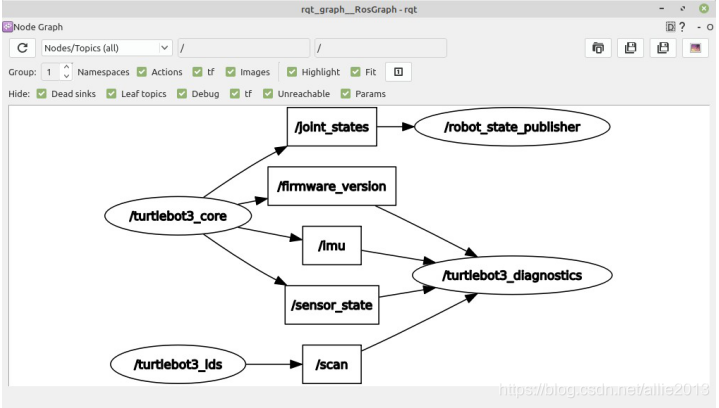
[远程PC]您可以看到使用下面的代码在图表中执行的各种节点和消息的信息。
4. 1. 3. 运行TurtleBot3在RViz
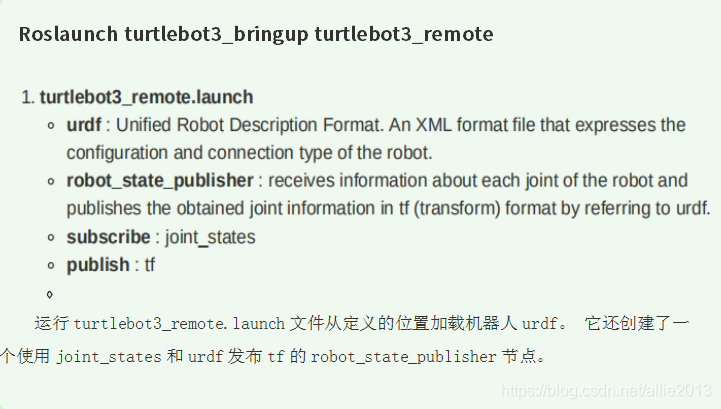
[远程PC]在运行启动之前指定Turtle Bot3模型名称。 指定其中使用的模型的名称![]() 在${TB3_MODEL}中,命令如下所示
在${TB3_MODEL}中,命令如下所示

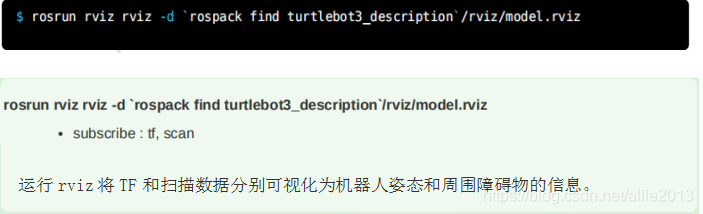
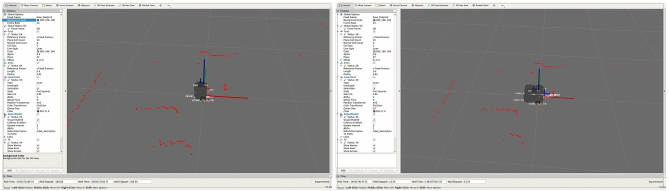
[远程PC]打开一个新的终端窗口并键入以下命令。 使用下面的命令可以通过加载RViz的配置文件来可视化带有RViz的Turtle Bot。
4. 2. 使用键盘进行远程控制
Turtle Bot3可以用各种设备远程控制。 对PS3、XBOX360、ROBOTIS RC100等控制器进行了远程控制测试。 硬件与Turtle Bot3 [DYNAMIXEL,树莓PI3B+,开放CR1.0,UbuntuMate16.04(ROS动能)]
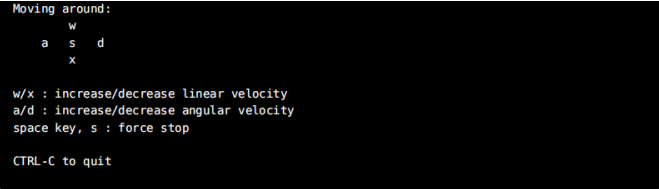
[远程PC]使用下面的命令运行turtlebot3_teleop_key节点。

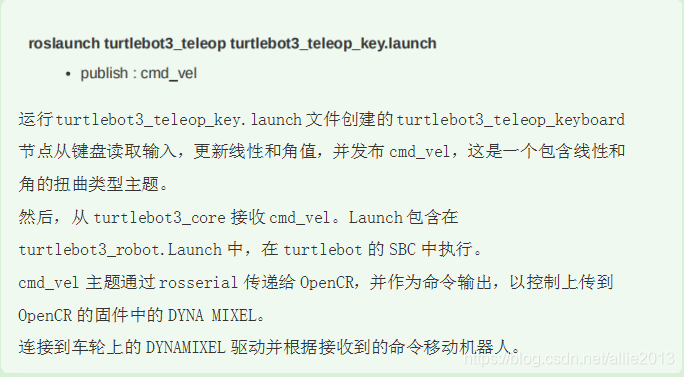
当节点成功执行时会出现以下消息,您可以使用键盘控制Turtle Bot3
![]()
<< 上一篇
下一篇 >>