MOTB3 ROS2机器人使用-1.硬件介绍
麦克纳姆四轮全向小车MOTB3是一个高度灵活的移动平台,能够实现任意方向的移动,常用于机器人开发与研究。MOTB3是Waffle Pi(参考TurtleBot3介绍)的升级版,主要区别是主处理器由树莓派4B更换为Jetson Orin Nano 8G,AI算力达40 TOPS,增加了GPU处理能力,雷达由LDS-02升级为A2M12,检测距离更远,采样频率更高,并增加了深度相机D435i,增加了深度视觉处理功能。并配备了12000mA大容量锂电池,容量是标准版电池的6倍,续航更持久。

Orin Nano
Jetson Orin Nano是英伟达全新一代的产品,8GB版本核心模组算力40TOPS,性能是Jetson Nano B01的80倍,是一款功能强大的人工智能(AI)开发板,可为边缘系统提供强大的计算机性能。借助高达40TOPS 的加速计算能力,它可以并行运行现代神经网络并处理来自多个高分辨率传感器的数据,足以满足一个完整AI系统的需求,支持所有通用的AI框架。


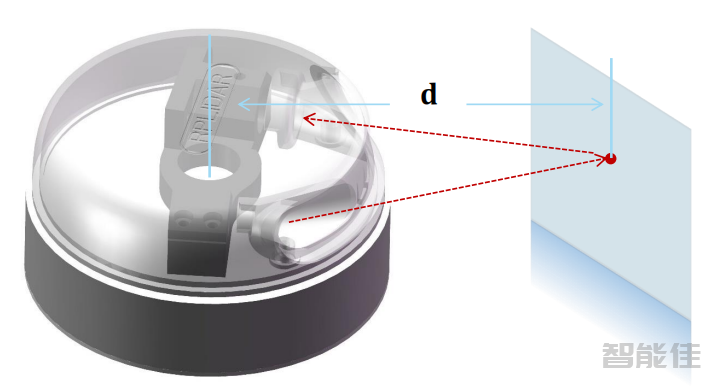
A2雷达
新一代低成本二维激光雷达(LIDAR),它具有每秒高达16000次的高速激光测距采样能力。并配备光磁融合(OPTMAG)专利技术,克服了传统激光雷达的寿命限制,可长时间可靠的稳定运行。RPLIDAR A2M12为增强版二维激光测距雷达,可以实现在二维平面的12米半径范围内进行360度全方位的激光测距扫描,并产生所在空间的平面点云地图信息。这些云地图信息可用于地图测绘、机器人定位导航、物体/环境建模等实际应用中。

D435i
英特尔®实感™深度摄像头D435i是一种立体视觉解决方案,它的广阔视野非常适合在机器人、增强现实、虚拟现实、智能家居等多种实现场景应用。它的开发环境配置非常简单,在Windows和 Ubuntu下提供大量可定制的软件例程与技术文档资料。D435i的全局快门传感器可提供极佳的弱光灵敏度,允许机器人在灯光熄灭的情况下自主导航,D435i通过基于三角测量法,左右红外相机进行测量深度,中间红外点阵投射器相当于补光灯(不打开也能测深度,只是效果不好),最右边的RGB相机用于采集彩色图片,最终可以将彩色视频流与深度流进行对齐,通过D435i的宽视野和全局快门传感器相结合,使其成为机器人导航和物体识别等应用的首选解决方案。

OpenCR
12000mA锂电池

<< 上一篇