ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2811 次浏览 /
人形机器人
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
项目背景对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务?我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特别是在高精度领域:策略中的错误可能会随着时间的推移而复合,而人类的演示可能是不...
2024年1月,谷歌 DeepMind 联合斯坦福推出了ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的抓持性能、更符合人体工程学设计和更强的稳健性,并且在国内就可以直接采购,整套成本还不到20万元人民币。可订购的套装件(建议工作桌自己配置,其他设备都可以采购)多样化的演示数据集推动了机器人学习的重大进步,但此类数据的灵活性和规模可能受到硬件成本、硬件鲁棒性和远程操作难易程度的限制。推出ALOH...
XL330-M288-T是一款紧凑型智能伺服电机,适用于机器人关节和精密控制。核心特点高扭矩输出:堵转扭矩最高达0.6N·m(6V),齿轮比288.4:1,适合高负载场景。轻量化设计:仅18g,尺寸20×34×26mm,适合空间受限应用。多种控制模式:支持位置/速度/电流/PWM控制,扩展多圈位置模式(±256圈)。高精度传感:12位无接触式绝对编码器,分辨率4096脉冲/转。通信灵活:TTL串口(3.3V逻辑,兼容5V),波特率9600bps~4Mbps,支持多设备总线。安...
购买链接智能佳机器人400 099 1872010-82488500/82488501www.bjrobot.com...
2026-05-12 /
1252 次浏览 /
人形机器人
采购链接物料清单(UR5)序号描述数量链接1DYNAMIXEL XL330-M288-T6https://item.jd.com/10026901343226.html#switch-sku 2DYNAMIXEL XL330-M077-T1https://item.jd.com/10152431689447.html#switch-sku 3U2D21https://item.jd.com/10152431689448.html#switch-sku&nb...
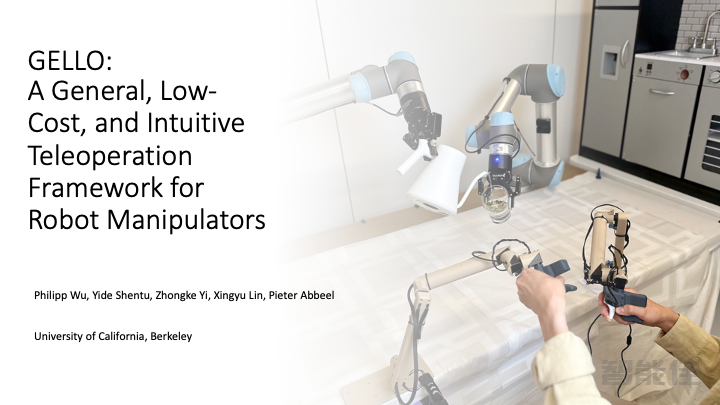
GELLO 是一个通用、低成本且直观的机器人机械臂远程操作框架。采购项目网站(查看GELLO 的论文和其他资源):https://wuphilipp.github.io/gello_site/软件库硬件库:访问 GELLO 硬件仓库,获取 STL 文件和硬件说明ROS 2 支持软件安装mkdir ~/projectscd ~/projectsgit clone https://ghfast.top/https://github...
关节信号参考值机器人类型关节信号参考自由度UR1 1 -1 1 1 16Panda1 -1 1 1 1 -1 17FR31 1 1 1 1 -1 17xArm71 1 1 1 1 1 17YAM1 -1 -1 -1 1 16cd ~/projects/gello_software/source .venv/bin/activatels /dev/serial/by-id运行指令控制(复制自己的设备号,替换/dev/serial/by-id/后面部分)python s...
手动gello_agent设置将 GELLO 和机械臂设置为已知的匹配配置(见下图),然后运行偏移检测脚本。机器人类型关节信号参考自由度UR1 1 -1 1 1 16Panda1 -1 1 1 1 -1 17FR31 1 1 1 1 -1 17xArm71 1 1 1 1 1 7YAM1 -1 -1 -1 1 16cd ~/projects/gello_software/source .venv/bin/activate ls /dev/serial/by...
cd ~/projects/gello_software/source .venv/bin/activatels /dev/serial/by-id机器人类型关节信号参考自由度UR1 1 -1 1 1 16Panda1 -1 1 1 1 -1 17FR31 1 1 1 1 -1 17xArm71 1 1 1 1 1 17YAM1 -1 -1 -1 1 16python3 scripts/gello_get_offset.py \
&...
1. 系统概述GELLO(Generalized End-to-End Learning for Locomation and manipulation Operations)是伯克利开源的低成本遥操作工具,可用于控制多种机械臂进行数据收集和遥控操作。本手册针对YAM机械臂的GELLO适配进行详细说明。GELLO支持多种主流机械臂平台,包括UR、Panda、FR3、xArm7等。YAM机械臂作为6自由度协作机械臂,通过GELLO可实现直观的演示教学和遥控操作。1.1 适用范围...
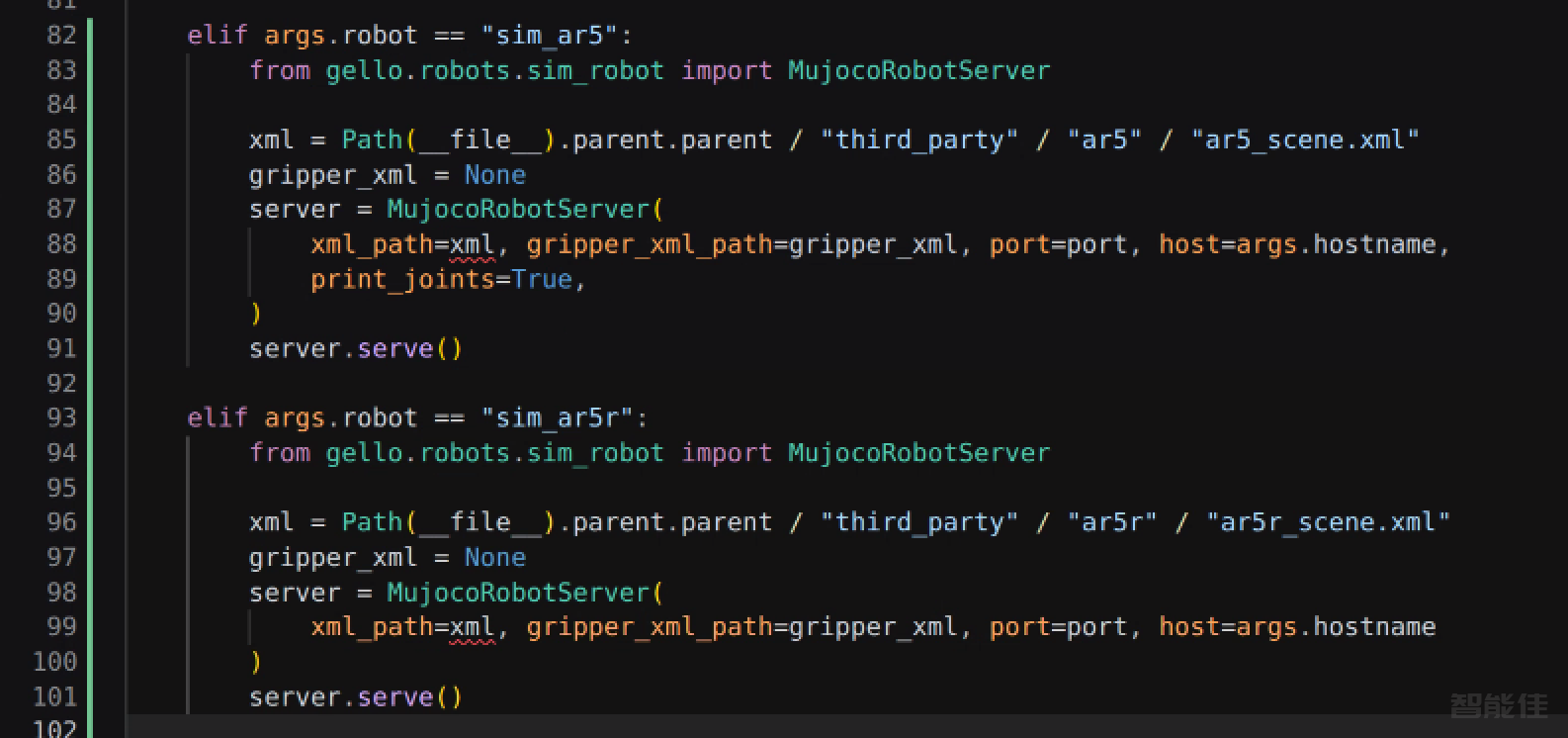
注意:此遥操版本为定制版本,如果您需要,请联系我们。1. 系统概述GELLO 是一个通用、低成本、直观的机器人遥操作框架。本手册专门介绍如何使用 GELLO 设备对ROKAE珞石 AR5 仿真机器人(MuJoCo 物理引擎)进行遥操作。2. 环境搭建2.1.下载源码,克隆官方仓库参考软件安装2.2.安装 AR5 补丁包将 AR5 补丁包中的文件复制到对应位置2.3硬件连接将 GELLO 设备通过 USB 连接到电脑,确认设备被识别:ls /dev/serial/by-id&n...
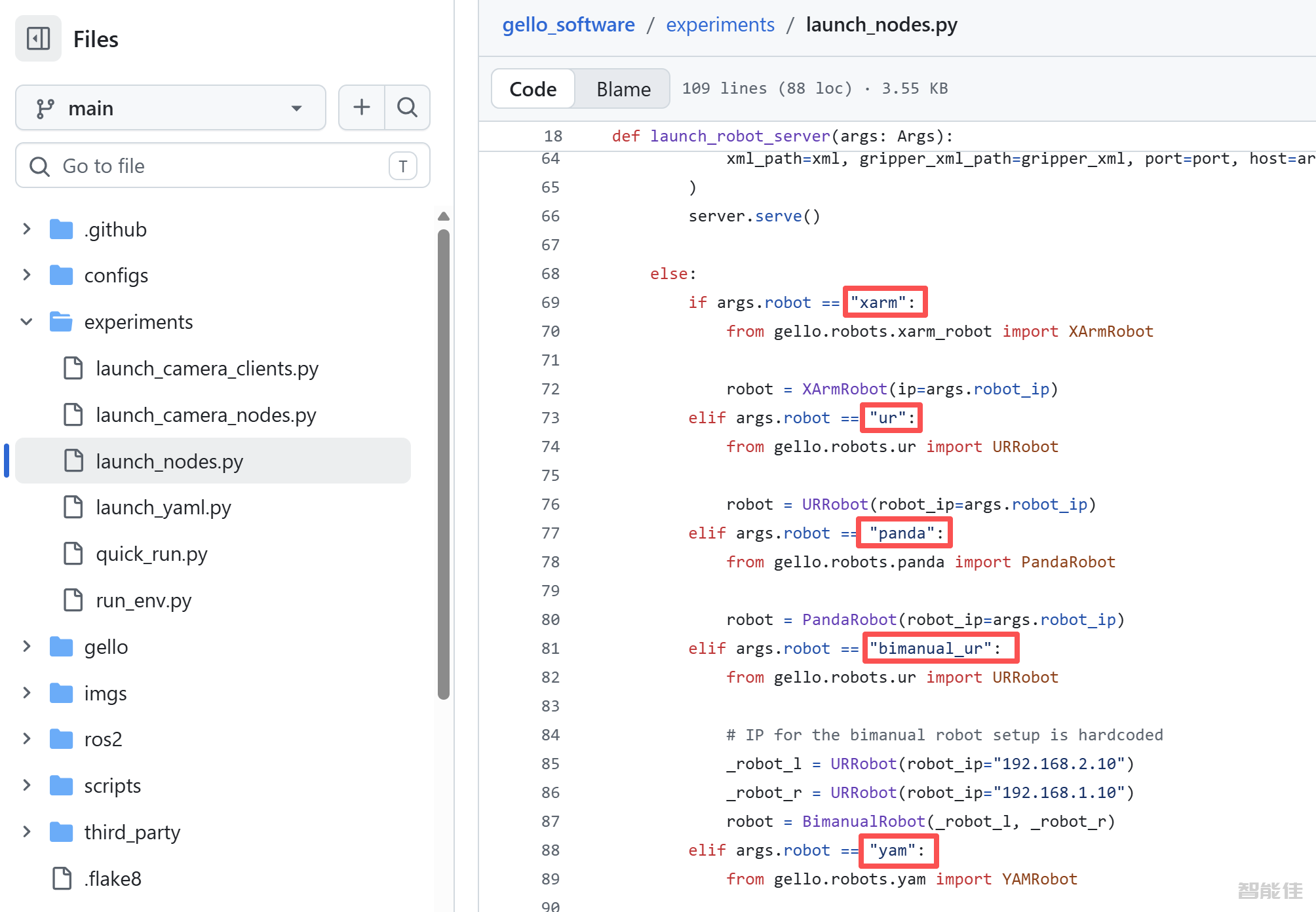
参考:https://github.com/wuphilipp/gello_software1.启动机器人节点格式:python experiments/launch_nodes.py --robot <ur|panda|xarm>例如:panda机器人python experiments/launch_nodes.py --robot panda2.启动 GELLO 控制器python3 experiments/run_env.py --agent=gello...
本文档详细介绍如何使用 GELLO 开源项目进行遥操作数据收集,适用于机器人模仿学习(Imitation Learning)任务。前置准备硬件要求● GELLO 设备: 已组装完成的 GELLO 遥操作主臂● 机械臂: 支持的机械臂(Franka Panda/FR3、UR、xArm、I2RT YAM 等)● 摄像头(可选): 用于视觉观测的腕部/基座摄像头● 计算机: Ubuntu 20.04/22.04 系统软件依赖确保已完成以下安装,具体参考,安装过的可以跳过这一步:#...
注意:官方版本ORCA内部舵机连接方式改为用3P-X系列短舵机线连接代替!视频介绍: document.getElementById("spkj").style.height=document.getElementById("spkj").scrollWidth*0.76+"px";...





![[资讯]国内也可以直接采购谷歌与斯坦福联合开发的ALOHA 2双臂协作开源平台了](http://www.rosrobot.cn/zb_users/upload/2024/02/202402201708422963558886.jpg)