
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2750 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2099 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

快捷进入目录命令cmspython3 record_episodes.py --task_name <your task_name> --episode_idx 0任务配置可以在constants.py文件中的TASK_CONFIGS字典中找到。TASK_CONFIGS提供了一个模板任务aloha_wear_shoe,其中包含所有可能的字段和一些占位符值。在这里,我们将仅关注任务名称、数据集目录、剧集长度和相机名称。配置字段描述任务名称任务名称应准确描述...

conda activate alohapython3 visualize_episodes.py --dataset_dir ~/aloha_data/aloha_mobile_dummy --episode_idx 0 会生成如下内容:...
conda activate alohapython3 replay_episodes.py --dataset_dir ~/aloha_data/aloha_mobile_dummy --episode_idx 0 数据存放位置(根据自己情况调整)home/robot/data ...
conda activate alohapython3 imitate_episodes.py --task_name aloha_mobile_dummy --ckpt_dir ~/runs/runs_aloha_mobile_dummy --policy_class ACT --kl_weight 1 --chunk_size 50 --hidden_dim 512 --batch_size 8 --dim_feedforward 3200 --lr 1e-5 --see...
1.主从操作的情况下,要避免主臂发生意外撞击,主臂的抖动会引起从臂的不正常运动。2.机械臂夹具模式报错属于正常现象,忽略即可 3.确保机器人运行时周围环境安全,避免障碍物或人员碰撞。4.使用结束后,请关闭机器人电源。5.遵守使用场所的相关安全规范。...

底盘充电123 移动电源充电123 ...
rosclean check清除日志rosclean purgepip install mujoco robosuite -i https://pypi.tuna.tsinghua.edu.cn/simple
grep -n "sim_" constants.py | head -20
python3 record_sim_episo...

GUI 显示权限问题,需要在宿主机执行以下命令# 允许本地所有用户访问 X11 显示xhost +local:# 验证echo $DISPLAY# 应该输出类似 :0 启动容器docker start ros_noetic进入容器docker exec -it ros_noetic bash...
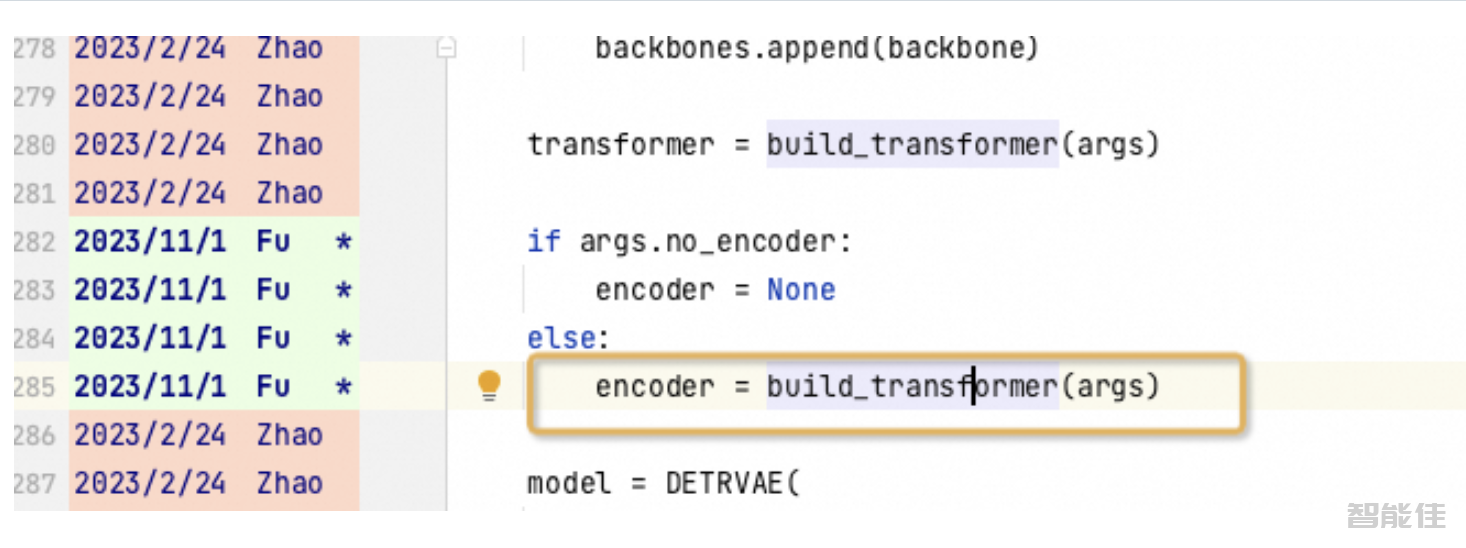
1、asset 机械臂模型的三维文件及仿真环境的建模文件2、byol_pytorch 与vinn相关的byol包3、detr &nb...

擦酒杯python3 visualize_episodes.py --dataset_dir ~/data/aloha_mobile_wipe_wine --episode_idx 0...