TurtleBot3入门教程-6.开机、调试准备、联网
设备准备
树莓派TB3、HDMI显示器、USB鼠标、USB键盘
用HDMI线连接TB3上的HDMI接口和HDMI的显示器。连接鼠标、键盘。

树莓派管脚定义:

开机
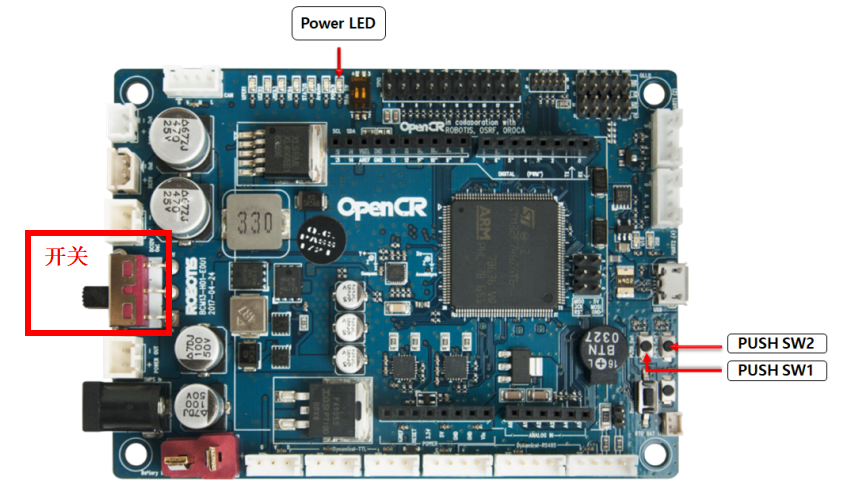
拨动openCR开关至如图所示位置,靠近黑色电源口为开。
登录
出现黑色命令行窗口。
输入用户名:robot
输入密码:robot (默认输入的密码是看不见的)
连接显示器
第一次登录,需要连接显示器,连接显示器的方法如下:


联网
对于ubuntu 18.04 server版本系统:
输入以下指令
cd /etc/netplan
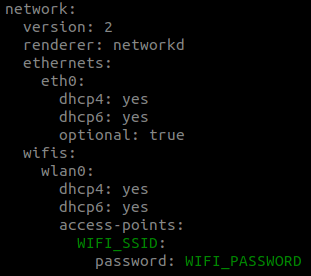
sudo nano 50-cloud-init.yaml
修改WIFI_SSID和WIFI_PASSWORD为你所在环境的wifi名称和密码。
Ctrl+x ,然后输入y,保存,退出,
重启
reboot
对于Ubuntu20.04 桌面版本系统:
点击右上角的wifi图标进行局域网的连接,(注意:不要用校园网)

网络配置
然后参考虚拟机网络配置,配置机器人的网络
sudo nano ~/.bashrc
或者
sudo vim ~/.bashrc
或者不熟悉vim 或者nano的用户,使用gedit
sudo gedit ~/.bashrc
到最后几行
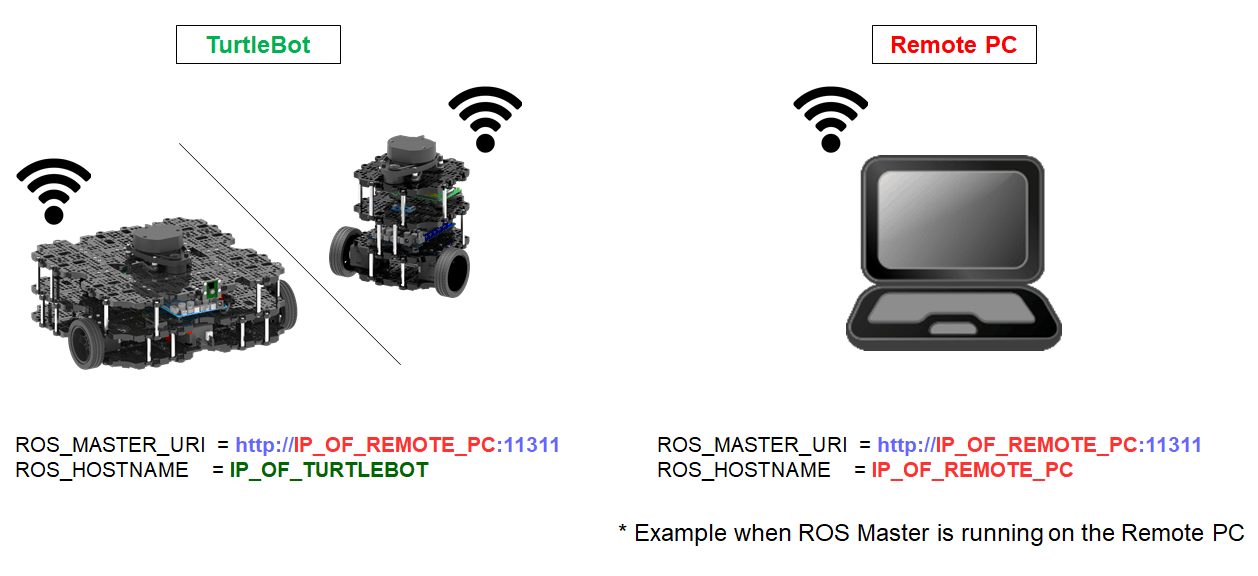
将相应的IP改成您自己机器人的ip地址(注意:小车端.bashrc文件下面一行的是小车,上面一行是虚拟机PC或者Master的IP,要注意区分,而虚拟机的文件配置都是本机虚拟机的IP)
使用Nano的用户使用Ctrl+x保存退出,vim的用:wq ,gedit直接保存退出
然后需要进行立即生效,执行以下指令
source ~/.bashrc
机器人端网络测试
【远程PC】运行
开启roscore
roscore

【机器人】端运行
rostopic list

当出现/rosout 和rosout_agg时候,说明通信成功。
<< 上一篇
下一篇 >>