TurtleBot4入门教程-2.特点
TurtleBot4

TurtleBot 4 是一款基于 ROS2 的移动机器人,用于教育和研究。TurtleBot 4 能够映射其周围环境、自主导航、在其相机上运行 AI 模型等等。
它使用Create® 3作为基础平台,并在其上使用 TurtleBot 4 外壳和用户界面 (UI) 板进行构建。外壳内有一个运行 TurtleBot 4 软件的 Raspberry Pi 4B。

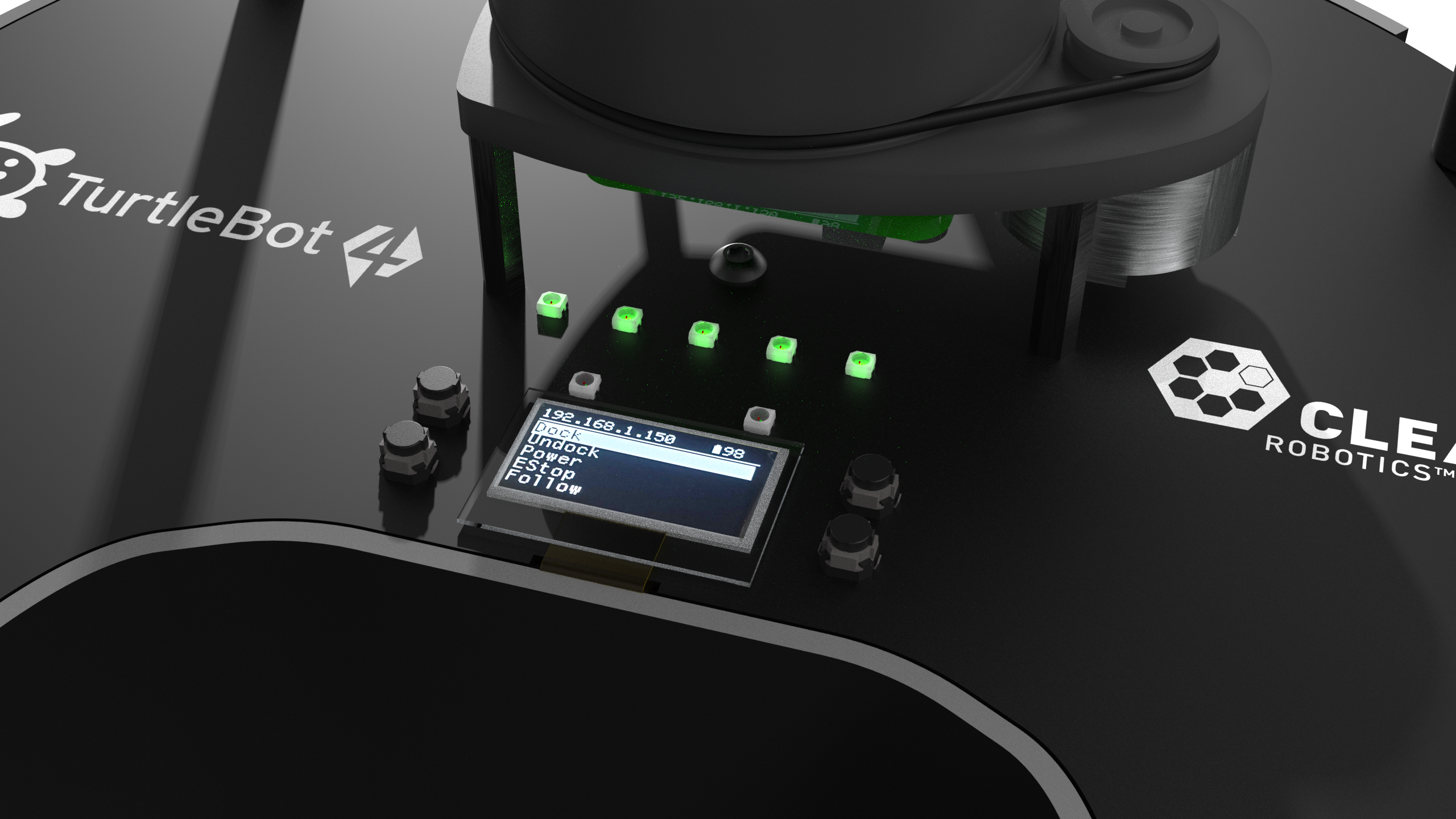
UI 板提供状态和用户 LED、用户按钮和 128x64 用户显示屏。此外,它还为用户提供了 4 个 USB 3.0(C 型)端口,以及额外的电源端口和一些 Raspberry Pi 引脚。
UI 板的顶部是RPLIDAR A1M8 360 度激光雷达和OAK-D-Pro相机。传感器上方是传感器塔,它允许用户使用额外的传感器或有效载荷定制他们的 TurtleBot4。
TurtleBot 4 精简版

TurtleBot 4 Lite 是 TurtleBot 4 的准系统版本。它只有导航、地图绘制和 AI 应用程序的必要组件。TurtleBot 4 具有相同的 Raspberry Pi 4B,它位于 Create® 3 的货舱中,以及相同的 RPLIDAR A1M8。TurtleBot 4 Lite 上的摄像头是OAK-D-Lite。额外的传感器和有效载荷可以连接到 Create® 3 面板,或放置在货舱内。
硬件规格
| 特征 | TurtleBot 4 精简版 | 海龟机器人 4 |
|---|---|---|
| 尺寸(长 x 宽 x 高) | 342 x 339 x 192 毫米 | 342 x 339 x 351 毫米 |
| 重量 | 3270 克 | 3945 克 |
| 基础平台 | iRobot® Create® 3 | iRobot® Create® 3 |
| 轮子(直径) | 72 毫米 | 72 毫米 |
| 离地间隙 | 4.5 毫米 | 4.5 毫米 |
| 车载电脑 | 树莓派 4B 4GB | 树莓派 4B 4GB |
| 最大线速度 | 安全模式下为 0.31 m/s,无安全模式下为 0.46 m/s | 安全模式下为 0.31 m/s,无安全模式下为 0.46 m/s |
| 最大角速度 | 1.90 弧度/秒 | 1.90 弧度/秒 |
| 最大有效载荷 | 9 公斤 | 9 公斤 |
| 操作时间 | 2h 30m - 4h 取决于负载 | 2h 30m - 4h 取决于负载 |
| 充电时间 | 2h 30m | 2h 30m |
| 蓝牙控制器 | 不包含 | TurtleBot 4 控制器 |
| 激光雷达 | RPLIDAR A1M8 | RPLIDAR A1M8 |
| 相机 | 橡木-D-精简版 | 橡木-D-Pro |
| 用户电源 | VBAT @1.9A 5V @ 低电流 3.3V @ 低电流 | VBAT @ 300 mA 12V @ 300 mA 5V @ 500 mA 3.3v @ 250 mA |
| USB 扩展 | USB 2.0(A 型)x2 USB 3.0(A 型)x2 | USB 2.0(A 型)x2 USB 3.0(A 型)x1 USB 3.0(C 型)x4 |
| 可编程 LED | Create® 3 光环 | Create® 3 Lightring 用户 LED x2 |
| 状态 LED | - | 电源 LED 电机 LED WiFi LED 通讯 LED 电池 LED |
| 按钮和开关 | Create® 3 个用户按钮 x2 Create® 3 电源按钮 x1 | Create® 3 个用户按钮 x2 Create® 3 个电源按钮 x1 用户按钮 x4 |
| 电池 | 26 Wh 锂离子电池(标称 14.4V) | 26 Wh 锂离子电池(标称 14.4V) |
| 充电座 | 包括 | 包括 |
传感器
RPLIDAR A1M8

RPLIDAR A1M8 是一款 360 度激光测距扫描仪,射程为 12m。它用于生成机器人周围环境的 2D 扫描。TurtleBot 4 和 TurtleBot 4 Lite 都使用此传感器。
橡木-D-精简版
Luxonis 的 OAK-D-Lite 相机使用 4K IMX214 色彩传感器和一对 OV7251 立体传感器来生成高质量的色彩和深度图像。板载 Myriad X VPU 使相机能够运行计算机视觉应用程序、对象跟踪和运行 AI 模型。
橡木-D-Pro

OAK-D-Pro 提供与 OAK-D-Lite 相同的所有功能,但使用更高分辨率的 OV9282 立体传感器,并增加了红外激光点投影仪和红外照明 LED。这使相机能够创建更高质量的深度图像,并在弱光环境中表现更好。
<< 上一篇
下一篇 >>