ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2751 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2100 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
按照以下说明使用 Gazebo 模拟 TurtleBot3 操作。安装模拟包安装用于 TurtleBot3 Manipulation Gazebo 模拟的软件包。[远程 PC]cd ~/turtlebot3_ws/src/git clone -b humble https://ghfast.top/https://github.com/ROBOTIS-GIT/turtlebot3_simulations.gitcd ~/turtlebot3_ws && col...
为了使用 MoveIt 在 Gazebo 中操作 OpenMANIPULATOR-X,请先终止其他 Gazebo 和 RViz 工具。输入以下命令启动带有 MoveIt 配置的 RViz。[远程 PC]ros2 launch turtlebot3_manipulation_moveit_config moveit_gazebo.launch.pyRViz 上的 MoveIt 界面将与 Gazebo 模拟器一起推出。...
在使用以下指令之前,请务必阅读SLAM手册。TurtleBot3 启动启动 TurtleBot3 ManipulationActual或Simulation使用以下命令。真实设备[TurtleBot3 SBC]ros2 launch turtlebot3_manipulation_bringup hardware.launch.py或Simulation [远程 PC]ros2 launch turtlebot3_manipulation_gazebo gazebo...
在使用以下说明之前,请务必阅读导航手册。TurtleBot3 启动启动 TurtleBot3 ManipulationActual或Simulation使用以下命令。Actual [TurtleBot3 SBC]ros2 launch turtlebot3_manipulation_bringup hardware.launch.py或Simulation [远程 PC]ros2 launch turtlebot3_manipulation_gazebo gazebo.lau...
笔记:本说明书已于Ubuntu 22.04和进行测试ROS2 Humble Hawksbill。更多信息,请参阅OpenMANIPULATOR 电子手册和[ROS 2] Turtlebot3 操作主场服务挑战赛场地和物品入门注意:在电脑上安装家庭服务挑战包之前,请务必完成以下说明。TurtleBot3 PC设置TurtleBot3 SBC 设置TB3 和 OpenMANIPULATOR-X软件包先决条件:ROS 2 安装了 Humble 的笔记本电脑或台式电脑。本说明基于 G...
ToddlerBot 2.0 发布了🥳!现在 Toddy 也能做侧手翻了🤸!自二月份首次发布以来,新增了众多功能;采购地址:https://item.jd.com/10137913865801.html🆕 ToddlerBot 2.0 新特性1. 动态动作能力• Cartwheel(侧手翻): 机器人可以完成杂技般的侧手翻动作。• Crawl(爬行): 能像婴儿一样匍匐前进。• Enhanced Walking(增强行走): 提升了步行的速度和稳定性。2. 沉浸式交互• VR...
2025-08-26 /
1017 次浏览 /
人形机器人
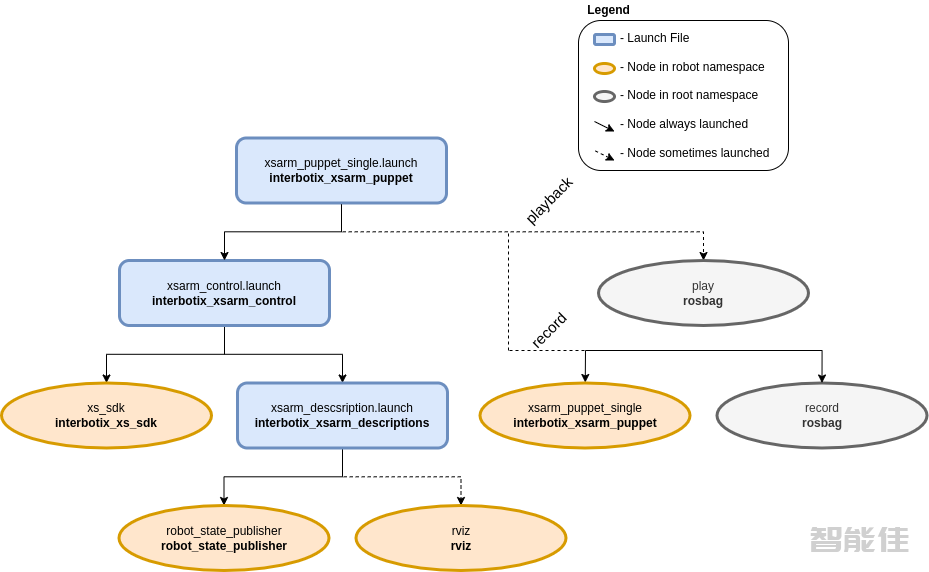
概述假设您希望机械臂执行某些动作来完成特定任务。一种方法是创建一个JointTrajectory ,其中包含特定时间点所需关节位置,然后您可以控制机器人执行这些动作。或者(耗时更少)您可以手动操控机械臂执行特定动作,并将其记录在 ROS bag 文件中。然后,您可以根据需要多次“回放”该 bag 文件,以便稍后在同一机器人上重复这些动作。此“记录/回放”功能由xsarm_puppet_single实现。结构如下所示,interbotix_xsarm_puppet包构建于int...
Crazyflie 包装盒内含以下物品。组装前,请确保所有物品齐全。 包装内容ü 1 x Crazyflie 2.0 或 2.1 控制板(已安装所有组件)ü 5 x 正桨ü 5 x 反桨ü 6 x 电机支架ü 1 x 锂聚合物电池ü 5 x 空心杯直流电机ü 2 x 短扩展连接器插针(1×10,间距 2mm,长度 8 或 9 mm)ü 2 x 长扩展连接器插针(1×10,间距 2mm,长...
Crazyflie 在生产时经过了全面的测试,但为了确保在运输/存储过程中没有出现任何问题,您应该在开始组装之前进行测试。使用 USB 电源(电脑或充电器)启动 Crazyflie,并查看以下测试结果。请注意,测试期间务必保持 Crazyflie 稳定,并远离强磁源。自检在开始组装任何东西之前,请将 Crazyflie 连接到 uUSB 电源,进行通电自检。M1 和 M4 LED 指示灯将显示测试结果。如果 M4 LED 指示灯以绿色快速闪烁五次,则表示测试通过。 ...
Hello,Robot!恭喜您拥有新机器人,欢迎加入 Stretch 开发者社区!本指南旨在帮助新用户探索 Stretch 3 机器人的功能和性能。Stretch 简介Strech 3认识你的新机器人!Stretch 是一款移动机械手——它由移动基座、机械臂和工具组成,能够导航并与周围环境交互。Stretch 的设计旨在促进与人以及在人类环境中的交互。其紧凑的占地面积和纤细的机械手在杂乱的现实世界空间中工作时具有独特的优势。轻巧的机身和线性关节使 Stretch 成为一款更加...