ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2756 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2110 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
Waffle Pi Pro(NucAD)是Waffle Pi(参考TurtleBot3介绍)的升级版,主要区别是主处理器由树莓派4B更换为Intel NUC,增加处理能力,雷达由LDS-02升级为A2M12,检测距离更远,采样频率更高,并增加了深度相机D435i,增加了深度视觉处理功能。并配备了12000mA大容量锂电池,容量是标准版电池的6倍,续航更持久。...
NUC介绍Intel NUC是一款专门为学习者和开发者打造的小型AI计算机。A2M12低成本360度激光扫描测距雷达新一代低成本二维激光雷达(LIDAR),它具有每秒高达16000次的高速激光测距采样能力。并配备光磁融合(OPTMAG)专利技术,克服了传统激光雷达的寿命限制,可长时间可靠的稳定运行。RPLIDAR A2M12为增强版二维激光测距雷达,可以实现在二维平面的12米半径范围内进行360度全方位的激光测距扫描,并产生所在空间的平面点云地图信息。这些云地图信息可用于地图...
NUC版TB3、HDMI显示器、USB鼠标、USB键盘用HDMI线(或者VGA转HDMI)连接TB3上的NUC接口和带有HDMI的显示器。连接鼠标、键盘。连接显示器后,开机屏幕效果如下:...
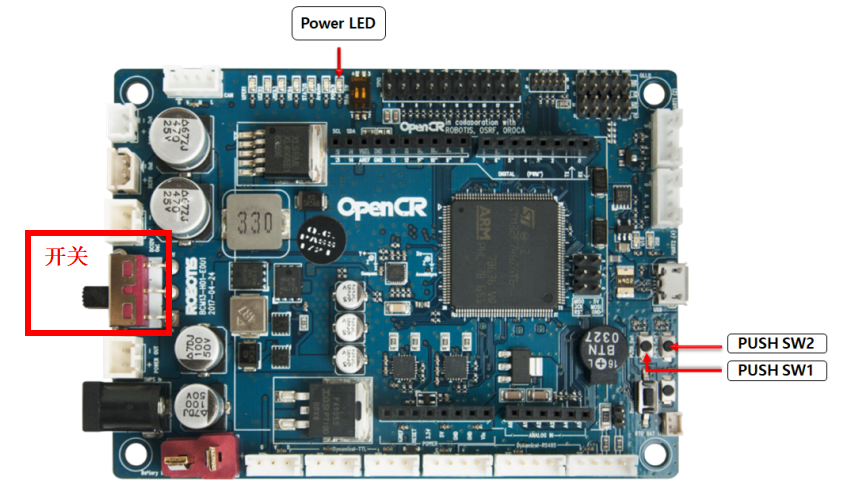
开机拨动openCR开关至如图所示位置,靠近黑色电源口为开。...
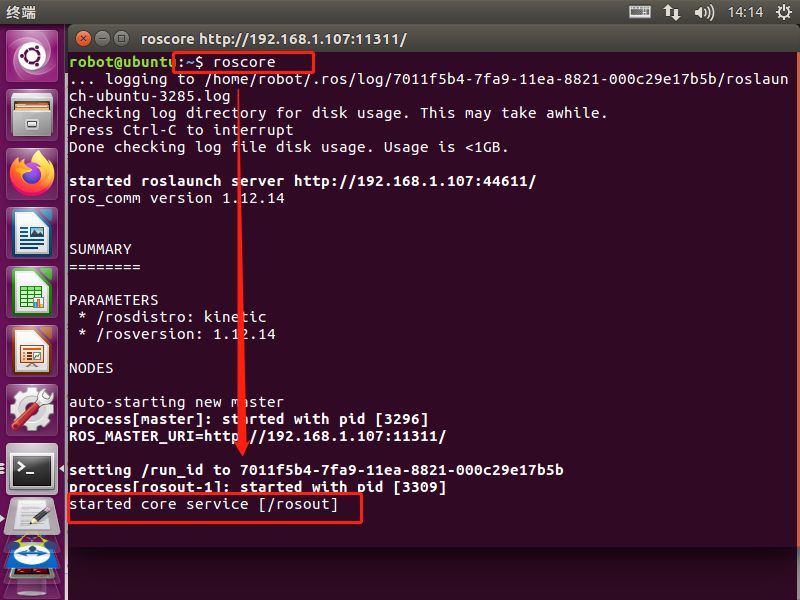
[Remote PC]启动roscoreroscore[Robot]启动机器人,roslaunch turbot3_bringup minimal_withD435i.launch注意:之前的版本没有withD435i.launch需要分别开启机器人本体和相机[Remote PC]启动进行简单远程操作测试roslaunch turbot3_teleop keyboard.launch[Remote PC] 如果文件成功启动,终端将显示以下内容。w 是增加线速度x 是降低线速度...
[Remote PC]启动roscoreroscore[Robot]启动机器人,roslaunch turbot3_bringup minimal_withD435i.launch注意:之前的版本没有withD435i.launch需要分别开启机器人本体和相机[Remote PC]运行SLAM启动文件roslaunch turbot3_slam gmapping_demo.launch[Remote PC]启动Rviz可视化模型roslaunch turbot3_rviz n...
1.说明导航技术的主要用途:使机器人进入期望的位置。2.准备主机已经启动roscorePC端新建Terminal(命令提示符),键入roscore,按下enter,启动roscore[Remote PC]启动roscoreroscore[Robot]启动机器人,roslaunch turbot3_bringup minimal_withD435i.launch注意:之前的版本没有withD435i.launch需要分别开启机器人本体和相机已经建好地图3.开始导航[远程主机(笔...
项目详细信息尺寸、重量直径 50 毫米,高度 30 毫米,39 克机械结构PCB、电机支架、用于漫射光的顶部白色塑料电池、充电时间锂聚合物充电电池(2 x 130 毫安时,3.7V)。可以连续工作大约 3 小时,充电时间约 1h30min。充电2 个充电触点,用于对接充电桩或通过 PC 或壁式插头的微型 USB充电处...
从2013年2月起,Elisa-3配备了一个新的顶部光漫射器(透光外罩),设计用于完美地安装在机器人的3个IR发射器中。扩散器(透光外罩)由塑料制成(3d打印),更加坚固,简化了拆卸和插入。图片如下:顶部光漫射器(透光外罩)和机器人被设计为锁定在一起,但漫射器(透光外罩)不是固定的,因此可以根据需要移除;顶部的光漫射器(透光外罩),顾名思义,有助于RGB led发出的光平滑地散开,此外,漫射器周围的条带可以让机器人更好地被其他机器人检测到。一旦顶部光漫射器(透光外罩)被移除,...
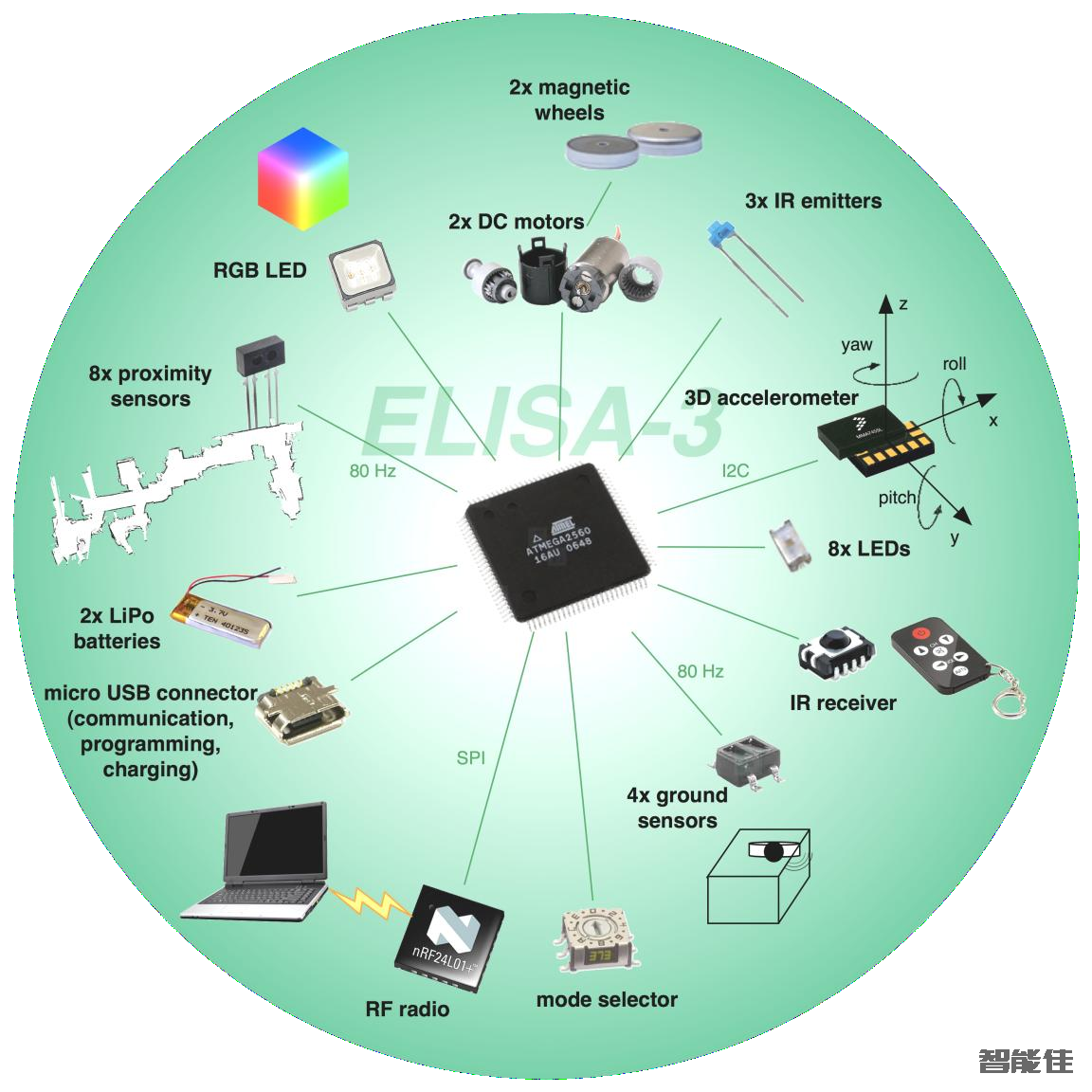
下图显示了Elisa-3机器人提供的主要部件及其物理位置:...