
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2764 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2116 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
测距板是一个新的开放式硬件/软件板,可让小型机器人进行通信,同时获得发射源的范围和方位。 开放的E-Puck测距板改进了现有的红外相对定位/通信软件库(libIrcom),该库是为E-Puck机器人开发的,并基于其机载红外传感器。 该板允许机器人具有一个体现的,分散的和可扩展的通信系统。使用E-Puck测距板,可以在机器人之间进行本地通信。 它基于红外通信,因此需要两个机器人之间的直接面对面通信。 该板具有许多不同的功能。 例如,发射机器人传输16位数据帧。 接收帧的机器人会...

使用E-Puck2测距板,可以在机器人之间进行本地通信。 它基于红外通信,因此需要两个机器人之间的直接面对面通信。 该板具有许多不同的功能。 例如,发射机器人传输16位数据帧。 接收帧的机器人会提取16位数据,并计算到发射器机器人的距离(范围)和方向(轴承)。 此外,该板还允许您将透射范围从0 cm更改为80 cm。 因此,您可以根据实验需要调整通讯范围。 最后,由于e-puck2机器人有许多不同的扩展模块,我们实现了两条不同的通信总线(I2C和UART),可以通过它们与开发...

让E-puck2测距板工作非常简单。你需要将测距板插到E-puck2机器人上。你也可以在机器人主板或任何其他具有两个主板的扩展板上顶部的黑色连接器。一旦你完成了,你就可以正常使用E-puck2测距板了。...
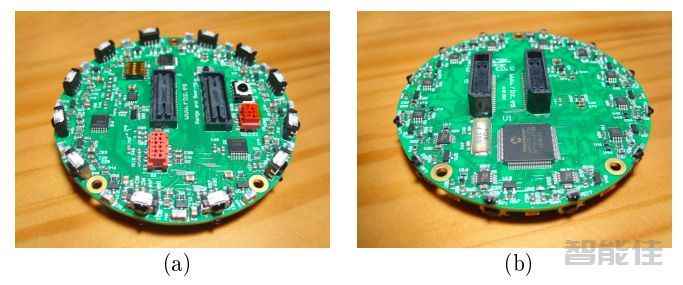
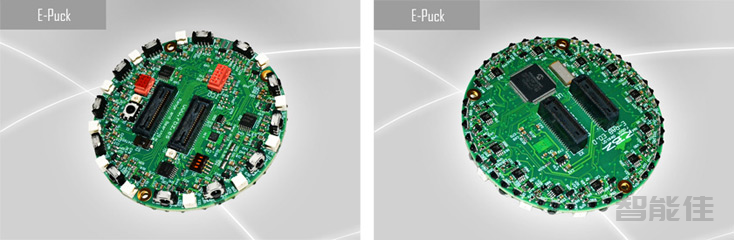
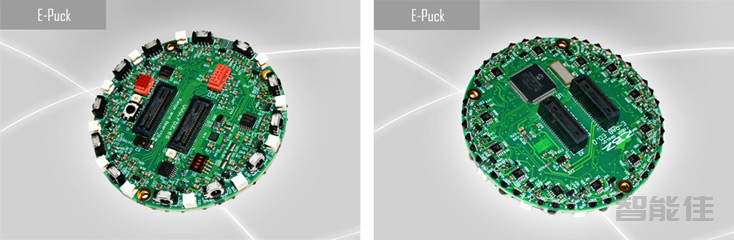
设计的E-puck2测距板(见图1)由其自己的处理器控制。每个板包括12组红外发射/接收模块。每个模块都配有一个红外发射二极管、一个红外调制接收器和一个红外光电二极管:如图2所示,这些模块几乎均匀分布在板的周边;所以,它们之间的角度大约是30◦为了正确理解本地化和通信系统及其复制或修改的可能性,接下来的小节详细介绍了板上执行的不同硬件模块。...
概述该板允许本地代理进行本地通信,同时获得发射器的范围和方位,而无需任何集中控制或任何外部参考。因此,该板允许机器人拥有一个具体的、分散的和可扩展的通信系统。该系统依赖于带频率调制的红外通信,由两个相互连接的模块组成,用于数据和功率测量。下表列出了I2C的寄存器映射:地址读写0如果数据可用1,否则0-1数据MSB-2数据LSB-3Bearing MSB-4Bearing LSB:double((MSB<<8)+LSB)*0.0001以获得角度(以度为单位...

e-puck1和e-puck2都支持范围和轴承扩展。该扩展连接到I2C总线,可以直接从Pi-puck读取。Pi-puck存储库中提供了一个用C编写的示例,展示了如何开始使用范围和方向扩展;您可以在目录/home/pi/Pi-puck/randb/中找到它。你需要两块板:一块是发射端(运行randb_tx),另一块是接收端(运行randb_rx)。接收器将打印从发射器接收的数据。您可以使用以下命令来构建程序。gcc randb_tx.c -o randb_tx gcc...