TurtleBot3入门教程-9.SLAM建立地图
这一节我们来讲Turtlebot3的SLAM
1.说明
SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建:希望机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。
2.通过远程操作创建地图
[远程主机(笔记本电脑)] 打开终端,然后运行SLAM启动文件。
确定机器人模型:
如果是burger:
export TURTLEBOT3_MODEL=burger
如果是waffle_pi,则:
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_slam turtlebot3_slam.launch
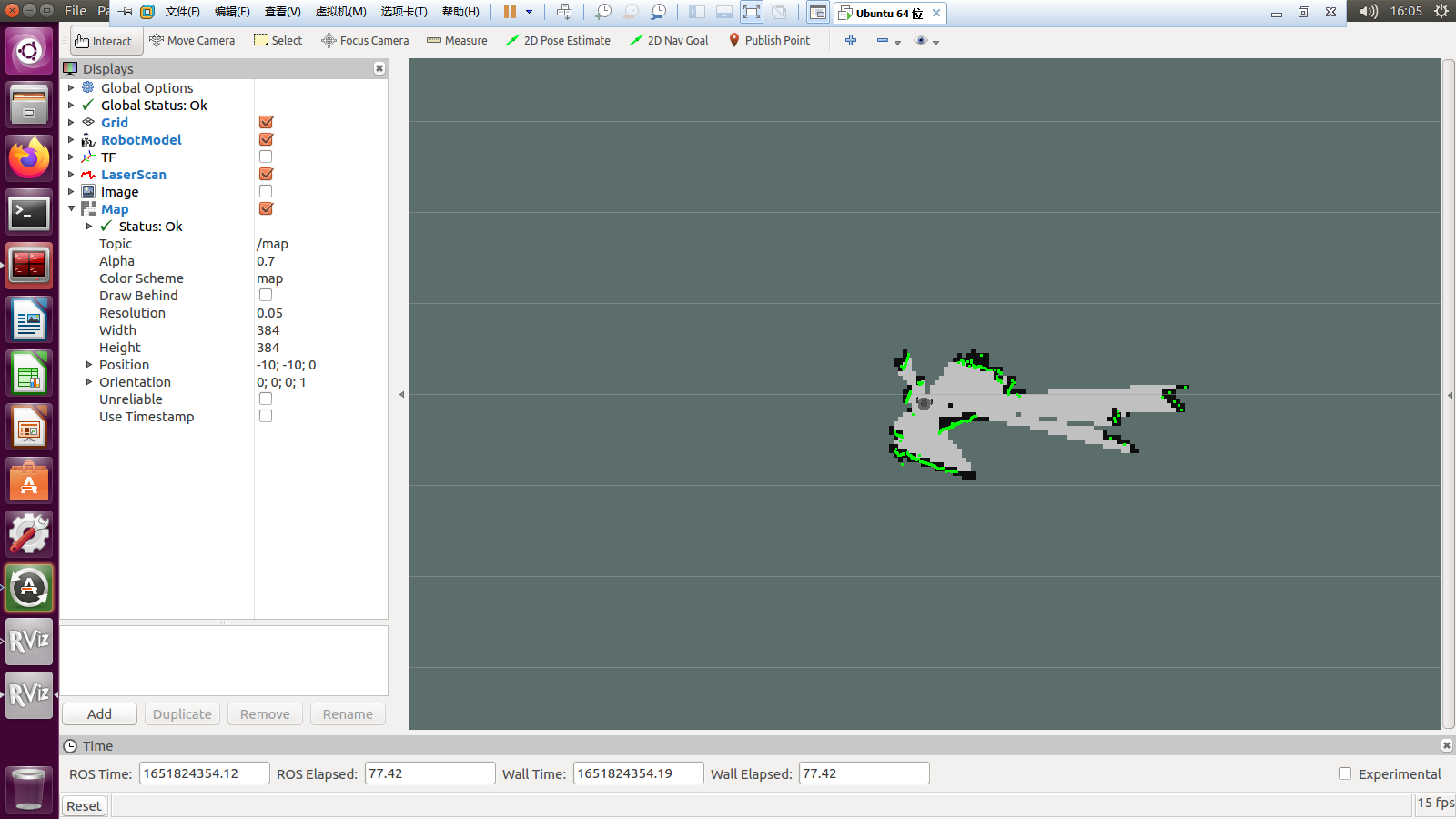
出现Rviz界面
 [远程主机(笔记本电脑)] 启动键盘操作
[远程主机(笔记本电脑)] 启动键盘操作
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
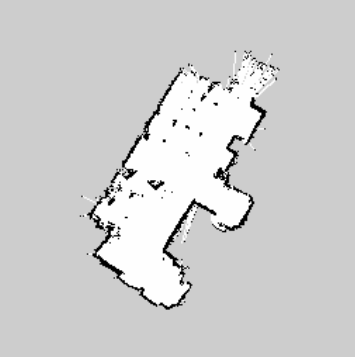
3.将地图保存到文件
[远程主机(笔记本电脑)] 打开终端,然后运行地图保存节点
rosrun map_server map_saver -f ~/map
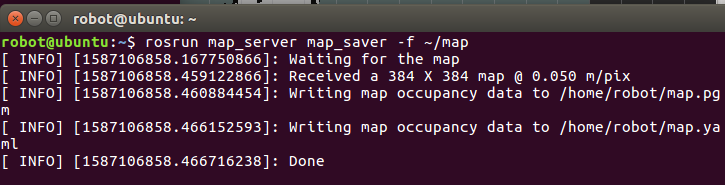
map.pgm和map.yaml 在 ~/ 目录里创建
该-f选项指的是保存地图文件的文件夹和文件名。如果 ~/map用作选项,map.pgm并将map.yaml保存在用户主文件夹的地图文件夹中~/($ HOME目录:) /home/<username>
<< 上一篇
下一篇 >>