
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2754 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2106 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
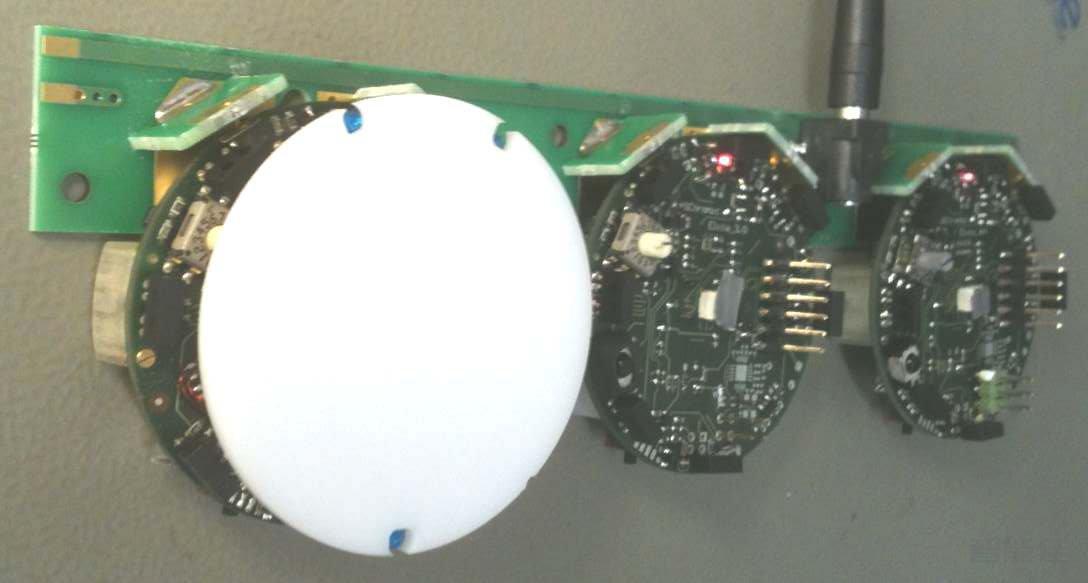
Elisa-3是Elisa机器人的升级版,基于不同的微控制器,包括一组全面的传感器:Atmel 2560微控制器(兼容Arduino)中央RGB led机器人周围的8个绿色LED红外发射器8个红外接近传感器(Vishay半导体反射光学传感器)4个地面传感器(Fairchild Semiconductor Minature反光物体传感器)3轴加速计(Freescale MMA7455L)通信用射频无线电(Nordic Semiconductor nRF24L01+)用于编程、调...
您可以使用DynamixelMotorsBus与作为链连接到相应USB总线的电机进行通信。此类利用Python Dynamixel SDK来促进电机的读取和写入。实例化DynamixelMotorsBus首先,使用相应的USB端口(例如)创建两个实例DynamixelMotorsBus,每个臂一个DynamixelMotorsBus(port="/dev/tty.usbmodem575E0031751"。要找到每个臂的正确端口,请运行实用程序脚本...
首先,通过运行以下命令之一来安装使用dynamixel电机(如Koch v1.1)构建的机器人所需的附加依赖项。使用pip:pip install -e ".[dynamixel]"...
按照组装指导手册提供的组装说明进行操作。这将指导您设置从动臂和引导臂,如下图所示。如需直观地了解组装过程,您可以参考此视频教程。...
本教程将指导您完成设置和训练神经网络以自主控制真实机器人的过程。您将学到的内容:1.如何组装您的机器人。2.如何连接、配置和校准您的机器人。3.如何记录和可视化您的数据集。4.如何使用您的数据训练策略并做好评估准备。5.如何评估您的政策并可视化结果。通过遵循这些步骤,您将能够重复诸如拿起乐高积木并以高成功率将其放入箱子中之类的任务,如图所示:本教程专门针对价格实惠的Koch v1.1机器人制作,但其中包含其他信息,通过更改一些配置,可以轻松适应各种类型的机器人,如Aloha双...
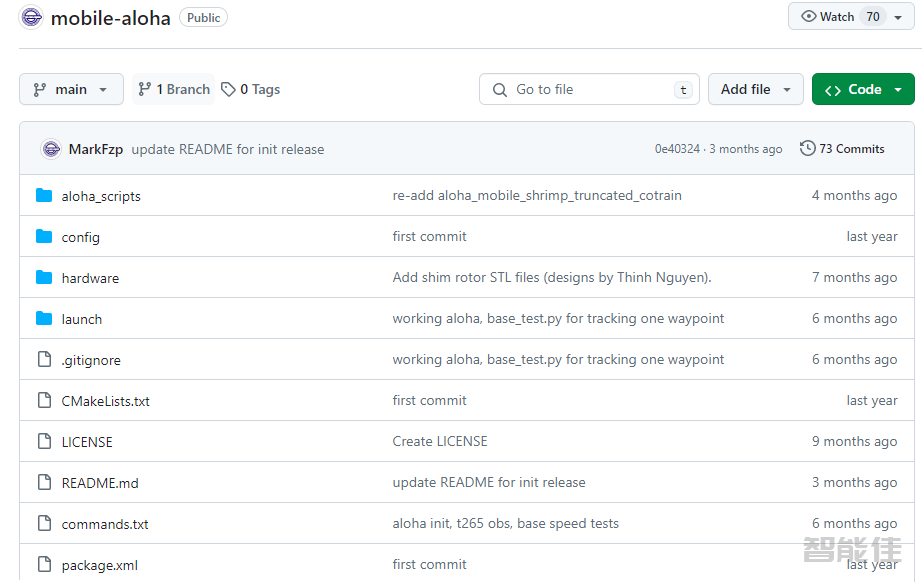
1、asset 机械臂模型的三维文件及仿真环境的建模文件2、byol_pytorch 与vinn相关的byol包3、detr &nb...

这个机器人是一款四轮全向移动的小型机器人,具有高度灵活性和精准的导航能力。它配备了舵轮系统,使其能够在任何方向上平稳移动,包括侧向和斜向,这为其在复杂环境中的运动提供了极大的自由度。主要特性:四轮全向驱动:四个轮子均为舵轮,允许机器人在狭小空间中灵活移动,包括原地旋转和横向平移。六自由度机械臂:配备一个六自由度的机械臂,能够执行复杂的抓取、搬运和操作任务。机械臂的多自由度设计使其可以在三维空间中进行精确的物体操控,适用于多种应用场景。RGB LED灯:机器人上装有4个RGB...

主控制器:NVIDIA JETSON NANO嵌入式控制器:MEGA2560开源控制器尺寸(长宽高):300x300x350mm(不含机械臂高度)运动结构:四颗高精度无刷直流电机转向机构:四颗大扭矩数字舵机运动方式:全向舵轮最大速度:1.5m/s越障能力:≥25mm最大负载:5kg传感器:包含激光雷达、D543i摄像头、9轴IMU、计算模块、车载屏幕等通讯模块:WIFI通讯模块电池:12V 12000Mah大容量电池运行时间:约6小时30分钟充电时间:约4小时30分钟操作系统...

注意:出厂默认系统预装为ubuntu20.04,已经装好所需的ROS以及功能包,不需要重复安装,固件已经刷好,不需要重复刷固件。调试准备:Omnidirectbot、USB鼠标、USB键盘、远程主机Jetson NanoNVIDIA® Jetson Nano™ 开发者套件是一款专为创客、学习者和开发者打造的小型AI计算机。 1-用于主存储器的microSD卡插槽2-40针扩展接头3-用于5V电源输入或设备模式的 Micro-USB 接口4-千...

步骤如下:双击NoMachine客户端,启动NoMachine客户端 添加远程主机打开NoMachine → 点击 “+ Add” 默认Port选择4000,Protocol选择NX 查看机器人IP注意:机器人的IP可以通过查询路由器后台,或者热点设置界面 Name 填写 robot在 Host 中填入 TurtleBot3 的IP,例如:19...