ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2754 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2106 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
充电接口位置如下:需要12V电源充电器充电器 充电中 充满...
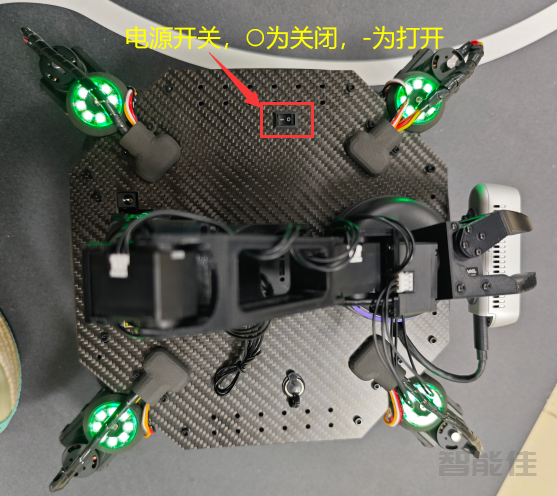
拨动开关至如图所示位置。联网和网络配置为了实现四轮全向舵轮协作机器人与PC之间的通信,要保证四轮机器人与PC端的网络都在一个局域网内。 首先获取四轮车端的IP。点击屏幕上的黑色终端,或者右键,打开一个terminal:输入以下指令:ifconfig 键入命令后回车,即可获取当前四轮车主机的 IP 地址。 同理,获取[Remote PC]的 IP 地址。如上图获取的 Remote PC 的...
这一节我们来讲omnidirectbot如何启动和使用1.启动主机[远程主机(笔记本电脑)]运行roscore笔记本电脑打开终端(ctrl+Alt+T),输入roscore,如果显示started core service [/rosout] ,则说明roscore打开成功。roscore2.启动omnidirectbot[omnidirectbot启动launch文件运行机器人程序sudo usermod -a -G dialout $USERroslaunch omnid...
运行键盘控制操作roslaunch omnidirectbot_teleop omnidirectbot_teleop_key.launch或者rosrun teleop_twist_keyboard teleop_twist_keyboard.py接下来就可以通过按照提示控制机器人的前、后、左、右、停动作了。 记住,可以先按下z降低速度到0.1左右,再进行前后左右测试。 [Remote PC] 启动进行简单远程指令操作测试rost...
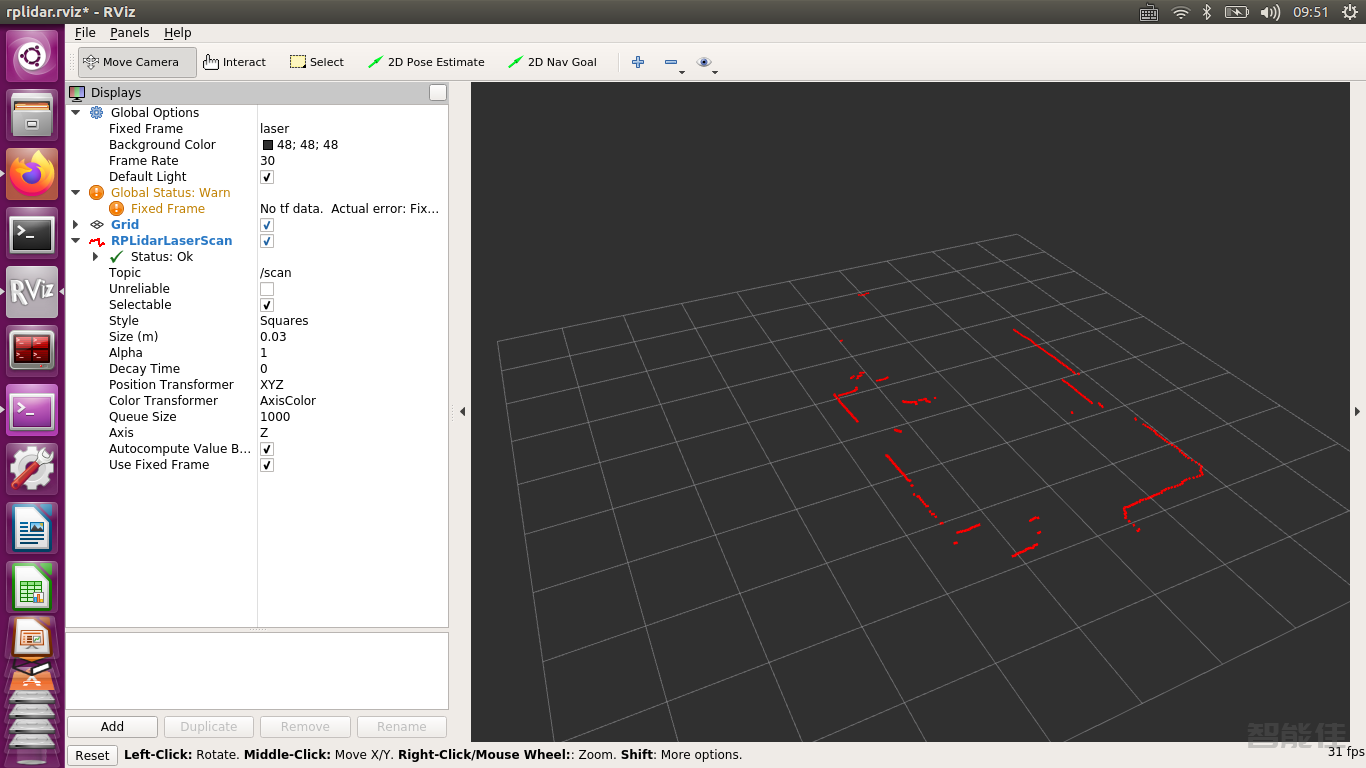
注意:此教程为单独测试雷达,测试完毕需要关闭view_rplidar.launch[Remote PC]启动roscoreroscore[Turtlebot3]启动雷达(A2M12波特率为256000)注意:启动该选项时候,需要将其他有关雷达的节点全部关掉。sudo usermod -a -G dialout $USERroslaunch rplidar_ros view_rplidar_a2m12.launch ...
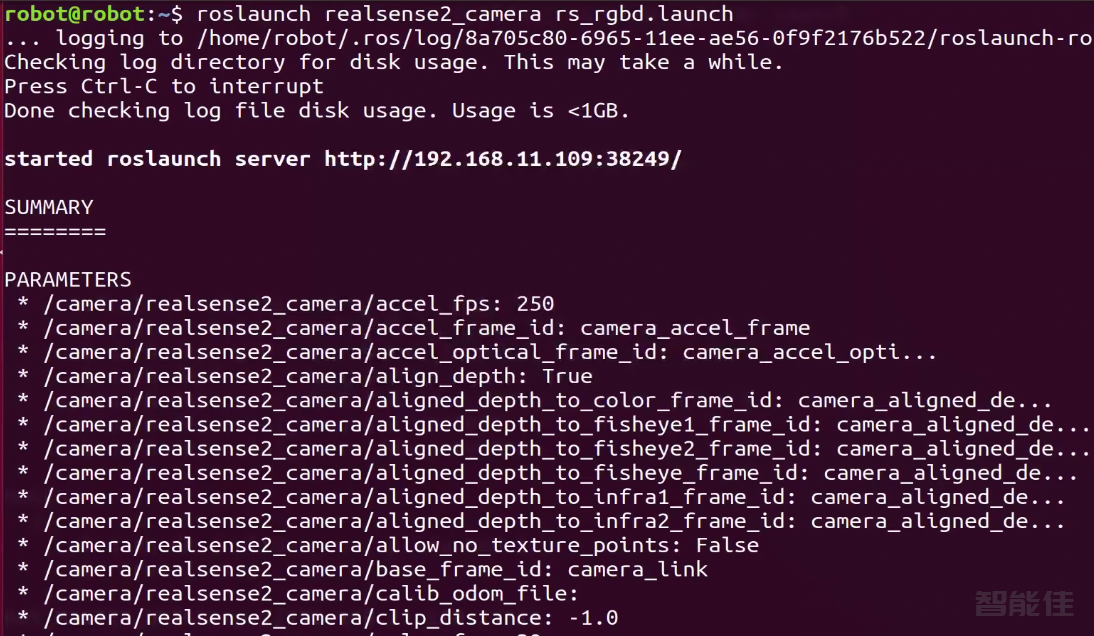
启动roscoreroscore启动相机:roslaunch realsense2_camera rs_rgbd.launch查看话题:rostopic list通过rqt_image_view查看rqt_image_viewtopic选择/camera/color/image_raw效果如图:...
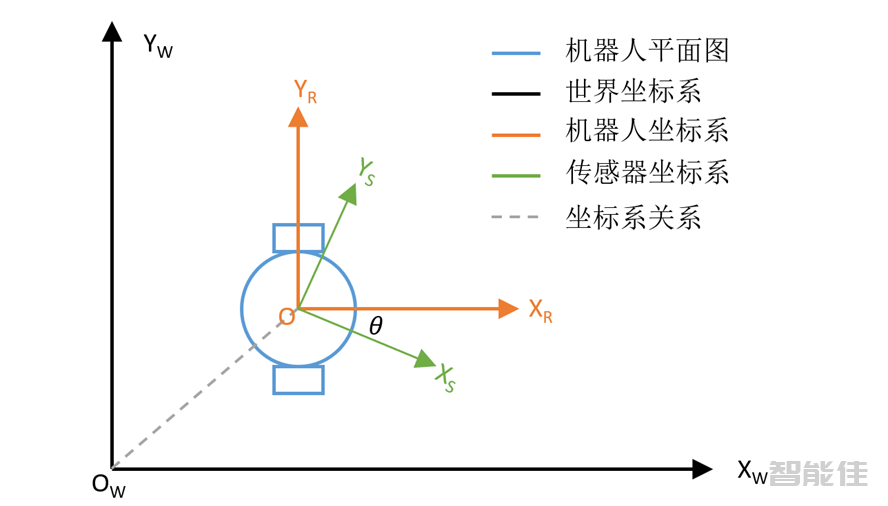
1.说明SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建:希望机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。 2.通过远程操作创建地图前提:机器人已经启动,参考:机器人启动[远程主机(笔记本电脑)] 打开终端,然后运行SLAM启动文件。roslaunch omnidirec...
打开终端,输入以下指令cd /home/robot/./start_arm.sh...
1.上电后发现电机为抱死。解决方法:重启机器。如果还是没效果,需要重新烧录一下固件。2.当四轮车充电时会出现充电指示灯红绿交替闪烁的情况这是因为小车耗电太多,属于低电量充电情况,需要及时充电。...
sudo apt install curlcurl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.shchmod +x xsarm_amd64_install.sh./xsarm_a...