
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2460 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
1834 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
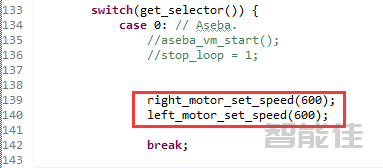
行走功能:代码用户自定义:当前所放置位置:134行:case 0:的后方代码:right_motor_set_speed(600);
left_motor_set_speed(600);简单讲解:直接调用函数left_motor_set_speed,控制左边轮子电机直接调用函数right_motor_set_speed,控制右边轮子电机电机类型:步进电机单位:step/s取值范围:0-1200 速度最大为1200 steps/s (约等...

避障功能代码行数:main.c 第493行代码:prox_values_temp[0] = get_calibrated_prox(0);
prox_values_temp[1] = get_calibrated_prox(1);
prox_values_temp[2] = get_calibrated_prox(2);
prox_values_temp[5] =&...
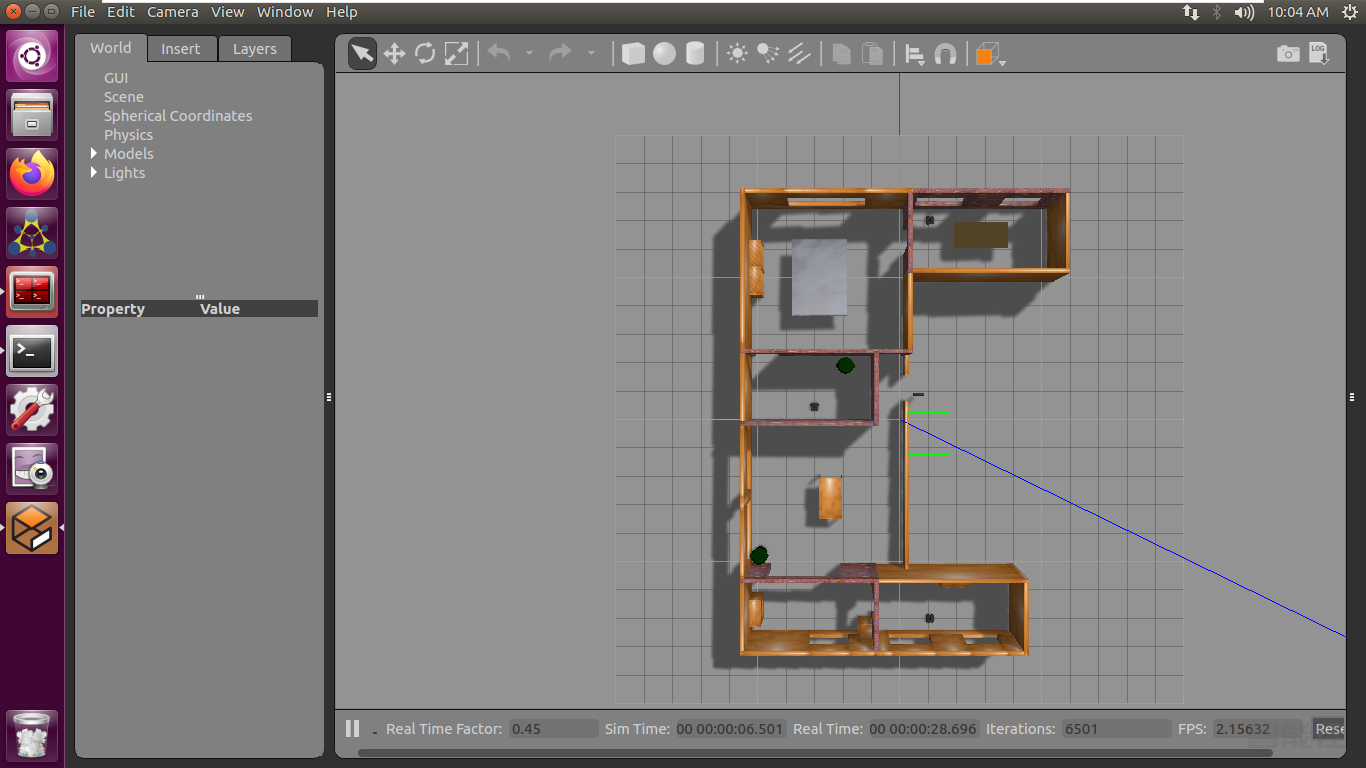
相关依赖安装安装multirobot-map-merge包sudo apt-get install ros-$ROS_DISTRO-multirobot-map-merge说明:先来一个仿真的案例步骤:开启roscoreroscore在Gazebo中的TurtleBot3 House环境加载三台机器人:roslaunch turtlebot3_gazebo multi_turtlebot3.launch分别打开三个新终端,三台机器人启动gmapping SLAM程序:第一个终...
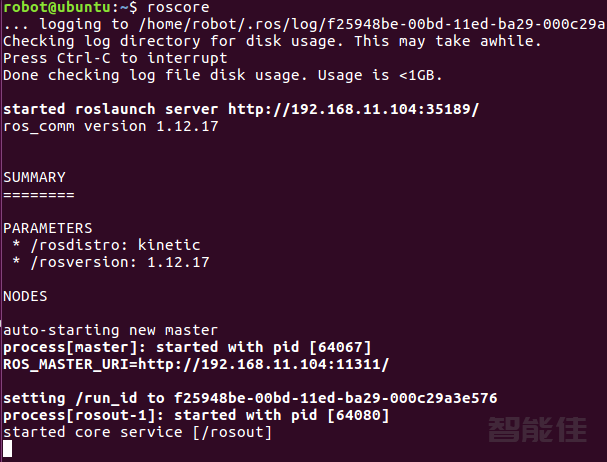
启动:[remotePC] 启动rosoreroscore启动第一台机器人ROS_NAMESPACE=tb3_0 roslaunch turtlebot3_bringup turtlebot3_robot.launch multi_robot_name:="tb3_0" set_lidar_frame_id:="tb3_0/base_scan"检查rostopic list同理启动第二台机器人ROS_NAMESPACE=tb3_1 ro...
[Remote PC]启动_remote.launchROS_NAMESPACE=tb3_0 roslaunch turtlebot3_bringup turtlebot3_remote.launch multi_robot_name:=tb3_0ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_bringup turtlebot3_remote.launch multi_robot_name:=tb3_1[Remote PC]启动SlamRO...

OpenMV Cam 是一款小型、低功耗的微控制器板,可让您在现实世界中使用机器视觉轻松实现应用程序。您可以使用高级 Python 脚本(由 MicroPython 操作系统提供 )而不是 C/C++ 对 OpenMV Cam 进行编程。这使得处理机器视觉算法的复杂输出和使用高级数据结构变得更加容易。但是,您仍然可以在 Python 中完全控制 OpenMV Cam 及其 I/O 引脚。您可以轻松触发外部事件拍照和视频,或执行机器视觉算法来找出如何控制 I/O 引脚。...
/
1997 次浏览/
机器人配件
本世纪开始,关于人工智能的研究进入了大发展阶段,包括全方位的具体的AI,例如斯坦福大学人工智能实验室STAIR(Stanford Artificial Intelligence Robot)项目,该项目组创建了灵活的、动态的软件系统的原型,用于机器人技术。在2007年,机器人公司Willow Garage和该项目组合作,他们十分具有前瞻性的,提供了大量资源进一步扩展了这些概念,经过具体的研究测试实现之后,无数的研究人员将他们的专业性研究贡献到ROS核心概念和其基础软件包,这期...
机器人是一个系统工程,它涉及机械、电子、控制、通信、软件等诸多学科。以前,开发一个机器人需要花很大的功夫,你需要设计机械、画电路板、写驱动程序、设计通信架构、组装集成、调试、以及编写各种感知决策和控制算法,每一个任务都需要花费大量的时间。因此像电影《钢铁侠》中那样,仅靠一个人的力量造出一个动力超强的人形机器人机甲是不可能的。...
什么是URDF 全称为 Unified Robot Description Format ,翻译为中文为 统一机器人描述性格式。那么这里我们可以确定,URDF是用来描述机器人的,通过一些特定的格式将机器人具体的描述出来,供计算机进行理解操作。URDF是Unified Robot Description Format的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种XML的方式描述机器人的部分结构,比如底盘、摄像头、激光雷...
RvizRViz是ROS Visualization Tool的首字母缩写,直译为ROS的三维可视化工具。它的主要目的是以三维方式显示ROS消息,可以将数据进行可视化表达。例如:可以显示机器人模型,可以无需编程就能表达激光测距仪(LRF)传感器中的传感器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值等以“ros- [ROS_DISTRO]-desktop-full”命令安...