
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2463 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
1841 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
包装内容Khepera IV包是在类似堆栈的架构中完成的。当你打开包装盒后首先,你会看到机器人:请用手指将机器人从包装中取出,通过泡沫中的预切割孔。然后,拆下泡沫衬垫。你应该能够看到带有以下附件的CD资料链接:您的包装应包含以下项目:• Khepera IV机器人• 带Khepera用户手册和软件的资料链接• USB转mini USB电缆• 摄像机镜头(已经安装在机器人中) • 带插头的AC/DC电源(...

Kilobots 是哈佛大学自组织系统研究实验室http://www.eecs.harvard.edu/ssr 设计的低成本机器人。机器人旨在进行测试机器人研究人员可以访问数百或数千个机器人的集体算法。虽然 Kilobots 是低成本的,但它们保持与其他集体机器人类似的能力。这些能力包括差动驱动器运动,机载计算能力,邻接到-邻居通信, 邻居到邻居距离感知和环境光感应。此外,它们的设计使得机器人不需要任何个人关注人类操作员。这使得控制...

Kilobot 机器人的主要规格如下:Ø 处理器:ATmega 328p(8 位@ 8MHz)Ø 内存: 32 KB Flash 1KB EEPROMØ 电池/自主:可充电锂离子电池 3.7V / 3-10 小时,睡眠模式下 3 个月Ø 充电:同时为 10 个机器人提供 Kilobot 充电器(可选)Ø&...
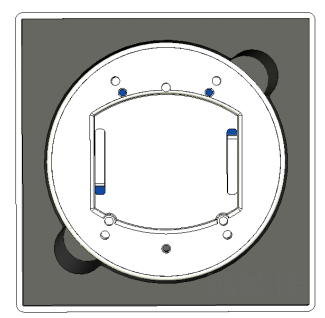
包装内容它们是 3 种不同的包装单独出售。 它们包含以下项目:Ø 机器人包:10 个 Kilobot 机器人Ø OHC 控制器包:1个OHC 控制器3 根电缆(1 USB,6 芯电缆和 2 芯电缆)Ø 充电器包: 1 个充电器1 个变压器检查打开包装后应检查材料。对于 Kilobots 机器人,检查他们的腿是否弯曲。充电标签也必须不要弯曲。跳线和电池应该存在(如图)。电池应在顶部插入负极(与电池座相反+/-标记)。对于 Ov...
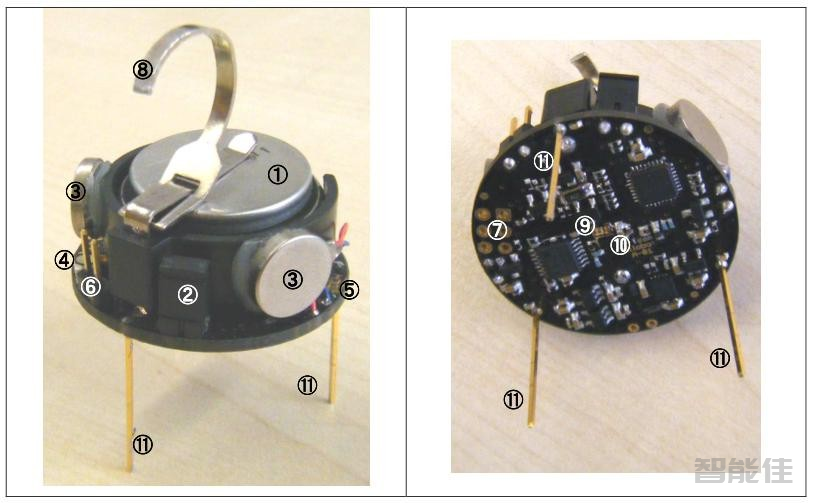
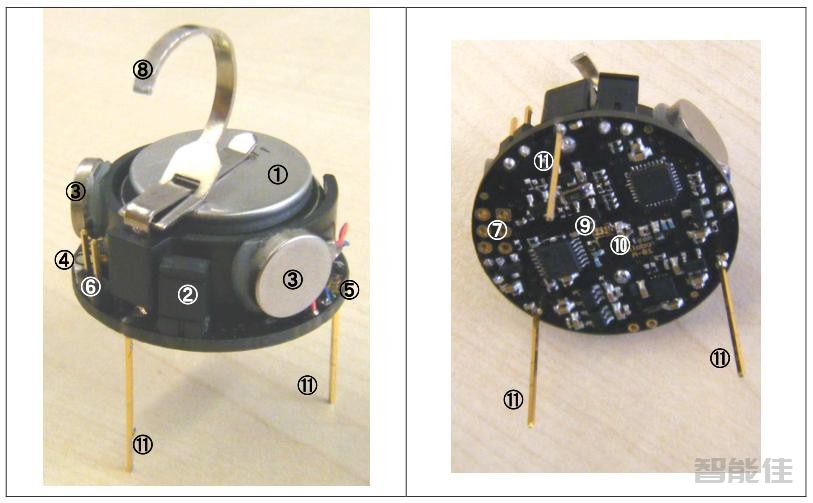
Kilobot 机器人图 3.1 中描述了 Kilobot 硬件的概述,作为以后参考。①3.7 伏电池( - 向上,+向下)②电源跳线帽③振动电机④LED(红/绿/蓝)⑤环境光传感器⑥串行输出接口⑦直接编程插座⑧充电片⑨红外发射器⑩红外接收器 ⑪机器人腿部...
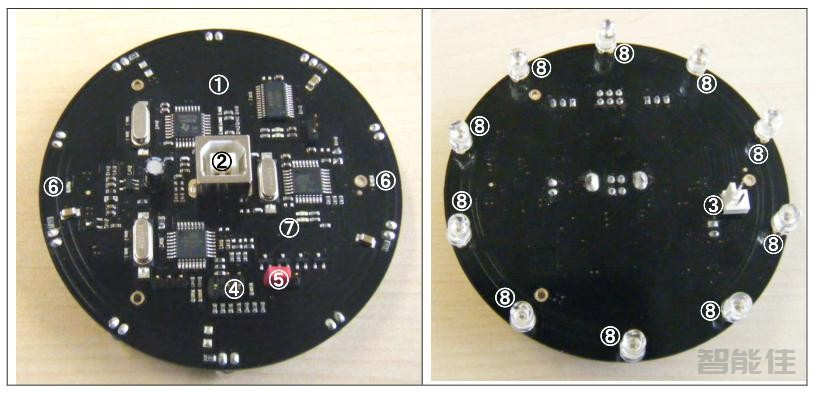
①OHC 控制器板②USB 电缆连接器③调试电缆连接器④固件编程连接器⑤固件编程跳线帽⑥用于 OHC 连接测试的发光二极管⑦电源指示 LED⑧10 个红外 LED...

机器人以微控制器 ATmega 328p(8 位@ 8MHz)作为 CPU。 它包含这些以下类型的内存: l 32 KB Flash 用于用户程序和引导加载程序(bootloader)l 1KB EEPROM 用于存储校准值和其他非易失性数据和 2KB SRAM。其他功能详述如下:Ø 电池:可充电锂离子电池 3.7V,可自行放电 3 个月睡眠模式。 每个 Kilobot 都有一个内置充电...

所需硬件/软件使用电路板和开发程序所需的硬件和软件如下所述。所需硬件:•具有Windows操作系统的和有USB端口的计算机•Kilobot机器人•控制器(OHC)•Kilobot充电器所需软件:WinAVR http://winavr.sourceforge.net/面向 C/C++开发人员的 Eclipse IDEhttp://www.eclipse.org/downloads/packages/release/luna/sr2/eclipse-ide-cc-develop...
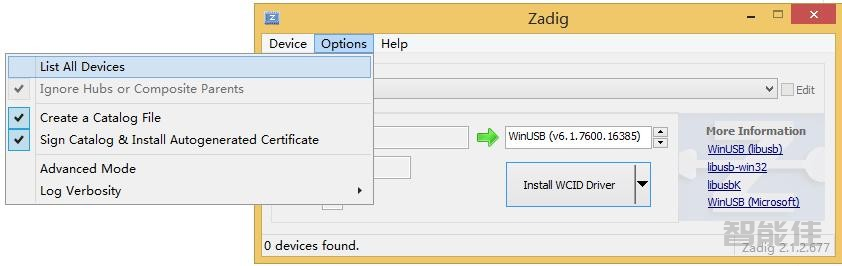
控制器OHC驱动软件需要安装,安装后只需运行KiloGUI即可访问你的控制器OHC。下载更新 OHC 的驱动程序如果KiloGUI界面无法识别您的OHC(以FTDI的方式),则需要修改驱动:1. 双击打开Drier updater目录下的软件 zadig_2.1.1.exe2. 选择Option勾选list All Devices3.选择 LUFA AVRISP MkII Clone 和 libu...
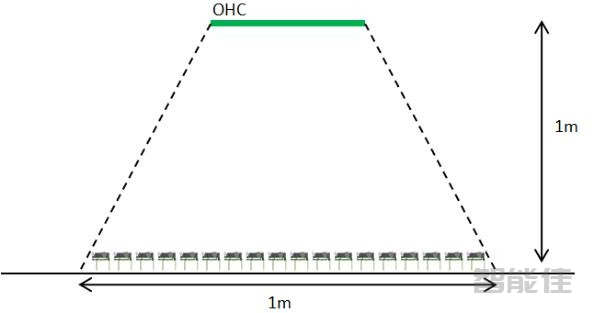
Kilobots应在光滑平坦的表面上操作,以确保适当的机器人移动性。为了辅助通信,表面应有光泽或反光,建议水平放置在比如镜子或干擦白板上。OHC控制器应悬挂在 Kilobots上方,距离约为1m。机器人放置在OHC下方大约1m直径区域,确保能够接收来自OHC的命令,如图所示。OHC控制器和机器人放置方式...