
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2460 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
1831 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

安装ROS功能包(Kinetic)如果没有创建工作空间,先创建一个mkdir -p ~/catkin_ws/srccd ~/catkin_ws/src/git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/DynamixelSDK.gitgit clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.gitgit clone -b...

安装ifcofigsudo apt-get install net-tools安装openssh-serversudo apt-get install openssh-server如果遇到以下情况,需要进行配置cd ~vim ~/.bashrc在最下方写入下面一行字符export TURTLEBOT3_MODEL=burger对于waffle_pi,改为export TURTLEBOT3_MODEL=waffle_pi 修改完毕后,退出保存(使用:wq)。或者,打开...

安装仿真包(Kinetic)cd ~/catkin_ws/src/git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.gitcd ~/catkin_ws && catkin_make安装仿真包(Melodic)cd ~/catkin_ws/src/git clone -b melodic-devel https://github.com/ROBOTIS...

在PC上下载和构建软件包。Google开发的Cartographer包支持0.2.0版本的 ROS1 Kinetic。因此,如果您需要在Kinetic上使用Cartogrpher,您应该按如下方式下载并构建源代码,而不是使用二进制包进行安装。sudo apt-get install ninja-build libceres-dev libprotobuf-dev protobuf-compiler libprotoc-devcd ~/catkin_ws/srcgit clon...

安装机械臂依赖sudo apt-get install ros-$ROS_DISTRO-ros-controllers ros-$ROS_DISTRO-gazebo* ros-$ROS_DISTRO-moveit* ros-$ROS_DISTRO-industrial-core -y安装机械臂ROS功能包(Kinetic)cd ~/catkin_ws/src/git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipul...

安装机械臂家庭服务挑战ROS包(Noetic)cd ~/catkin_ws/src/git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_home_service_challenge.gitgit clone -b noetic-devel https://github.com/machinekoder/ar_track_alvarcd ~/catkin_ws && catkin...
sudo apt install wget -yecho "export TURTLEBOT3_LASER_SENSOR=rplidar" >> ~/.bashrcsource ~/.bashrccd ~/catkin_ws/srcwget http://www.rosrobot.cn/zb_users/upload/software/tb3/turbot3.zipwget http://www.rosrobot.cn/zb_users/upl...
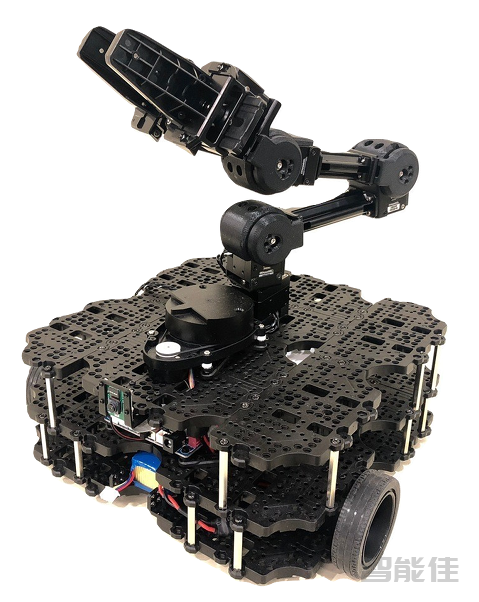
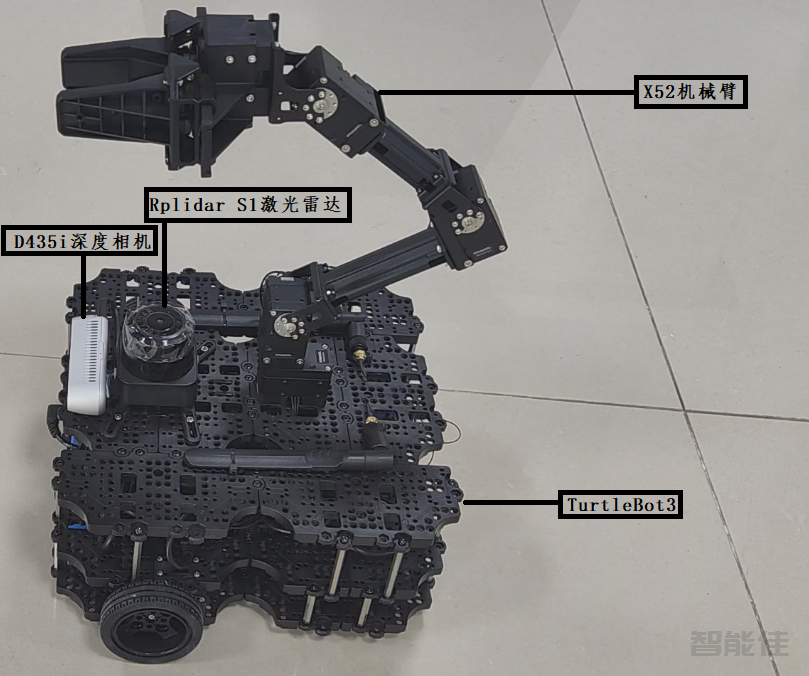
OpenMANIPULATOR-X是一款支持ROS的机械臂。具有通过使用DYNAMIXEL舵机和3D打印部件能够以低成本轻松制造的优势。OpenMANIPULATOR-X具有与TurtleBot3 Waffle和Waffle Pi兼容的优势。通过这种兼容性可以弥补自由度的不足,作为具有TurtleBot3所具有的SLAM和导航能力的服务机器人可以具有更大的完整性。TurtleBot3和OpenMANIPULATOR-X可以用作移动mobile manipulator...
...

安装时先拆下激光雷达并将其移到前面(红色圆圈代表螺丝位置)其次,将OpenMANIPULATOR附加到TurtleBot3上(黄色圆圈代表螺栓的位置)...